
سوف تساعد الروبوتات الشبيهة بالديدان قريبًا فرق البحث والإنقاذ المستقبلية
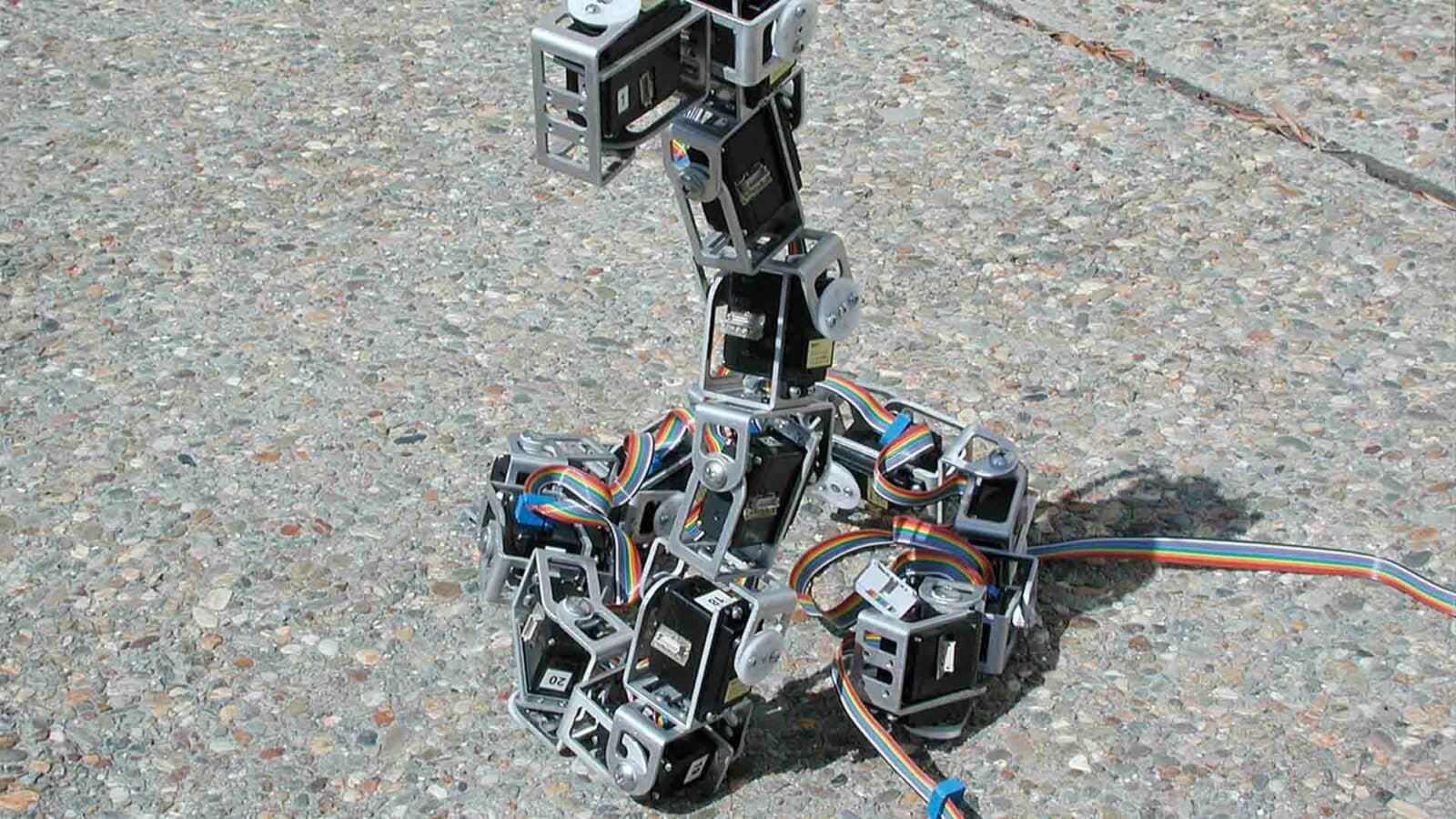
نشرت: 2024-02-25لقد ظل العلماء يحاولون بناء روبوتات تشبه الثعابين بلا أطراف منذ عقود. يمكن أن تكون هذه الروبوتات مفيدة في حالات البحث والإنقاذ، حيث يمكنها التنقل في المباني المنهارة للعثور على الناجين ومساعدتهم.
بفضل أجسامها النحيلة والمرنة، يمكن للروبوتات بلا أطراف أن تتحرك بسهولة عبر الأماكن الضيقة والمزدحمة مثل حقول الحطام، حيث تميل الروبوتات التي تسير أو ذات العجلات وعمال الإنقاذ البشريون إلى الفشل.
ومع ذلك، فحتى الروبوتات عديمة الأطراف الأكثر تقدمًا لم تقترب من التحرك بخفة الحركة وتعدد الاستخدامات التي تتمتع بها الديدان والثعابين في التضاريس الصعبة.
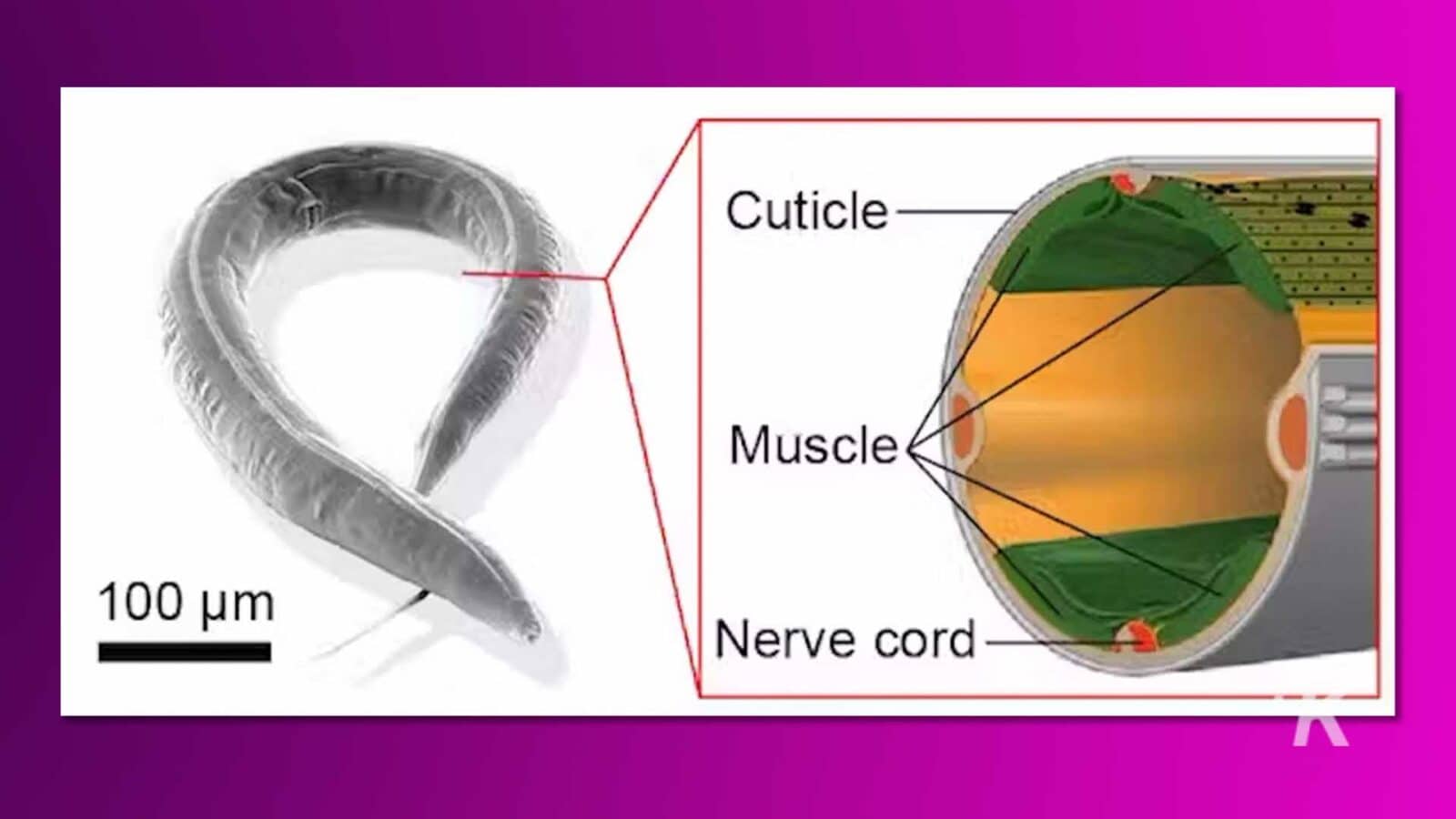
حتى الدودة الخيطية الصغيرة Caenorhabditis elegans ، التي لديها جهاز عصبي بسيط نسبيًا، يمكنها التنقل عبر البيئات المادية الصعبة.
وكجزء من فريق من المهندسين وعلماء الروبوتات والفيزيائيين، أردنا استكشاف هذا التناقض في الأداء. ولكن بدلاً من البحث عن إجابة في علم الأعصاب، لجأنا إلى الميكانيكا الحيوية.
لقد شرعنا في بناء نموذج روبوت يقود جسمه باستخدام آلية مشابهة لكيفية قيام الديدان والثعابين بتعزيز حركتها.
المتموجات والذكاء الميكانيكي
على مدى آلاف السنين، طورت الكائنات الحية أجهزة عصبية معقدة تسمح لها باستشعار محيطها المادي ومعالجة هذه المعلومات وتنفيذ حركات الجسم الدقيقة للتنقل حول العقبات.
في مجال الروبوتات، يصمم المهندسون خوارزميات تستقبل المعلومات من أجهزة الاستشعار الموجودة على جسم الروبوت - وهو نوع من الجهاز العصبي الآلي - ويستخدمون تلك المعلومات لتحديد كيفية التحرك. عادة ما تكون هذه الخوارزميات والأنظمة معقدة.
أراد فريقنا اكتشاف طريقة لتبسيط هذه الأنظمة من خلال تسليط الضوء على الأساليب التي يتم التحكم فيها ميكانيكيًا للتعامل مع العوائق التي لا تتطلب أجهزة استشعار أو حسابات. للقيام بذلك، لجأنا إلى أمثلة من علم الأحياء.
لا تعتمد الحيوانات فقط على الخلايا العصبية – خلايا الدماغ والأعصاب الطرفية – للتحكم في الحركة.
كما أنهم يستخدمون الخصائص الفيزيائية لأجسامهم - على سبيل المثال، مرونة عضلاتهم - لمساعدتهم على التفاعل مع بيئتهم بشكل عفوي، حتى قبل أن تتاح لخلاياهم العصبية فرصة للاستجابة.
في حين أن الأنظمة الحسابية تحكمها قوانين الرياضيات، فإن الأنظمة الميكانيكية تحكمها الفيزياء. ولتحقيق نفس المهمة، يمكن للعلماء إما تصميم خوارزمية أو تصميم نظام فيزيائي بعناية.
على سبيل المثال، تتحرك الروبوتات والحيوانات بلا أطراف عبر العالم عن طريق ثني أجزاء من أجسامها يمينًا ويسارًا، وهو نوع من الحركة يسمى التموج.
إذا اصطدموا بعائق ما، عليهم الابتعاد والالتفاف حوله من خلال الانحناء إلى جانب واحد أكثر من الجانب الآخر. ويمكن للعلماء تحقيق ذلك باستخدام الروبوت عن طريق ربط أجهزة استشعار برأسه أو جسمه.
يمكنهم بعد ذلك تصميم خوارزمية تخبر الروبوت بالابتعاد أو الالتفاف حول العائق عندما "يشعر" بقوة كبيرة بما يكفي على رأسه أو جسمه.
وبدلاً من ذلك، يمكن للعلماء أن يختاروا بعناية مواد الروبوت وترتيب وقوة محركاته بحيث تنتج الاصطدامات تلقائيًا شكل الجسم الذي يؤدي إلى الدوران.
سيكون لدى هذا الروبوت ما يسميه العلماء "الذكاء الميكانيكي".
إذا تمكن العلماء من أمثالنا من فهم كيفية استجابة أجسام الكائنات الحية ميكانيكيا للاتصال بالأشياء الموجودة في بيئتها، فسوف نتمكن من تصميم روبوتات أفضل قادرة على التعامل مع العقبات دون الاضطرار إلى برمجة خوارزميات معقدة.
إذا قارنت مجموعة متنوعة من الكائنات الحية المتموجة مع حديقة الحيوان المتزايدة الحجم من "الثعابين" الآلية، فسيبرز أحد الاختلافات بين الروبوتات والكائنات المتموجة البيولوجية.
تقوم جميع الروبوتات المتموجة تقريبًا بثني أجسامها باستخدام سلسلة من الأجزاء المتصلة بمحركات في كل مفصل. لكن هذه ليست الطريقة التي تنحني بها الكائنات الحية.
وعلى النقيض من ذلك، فإن جميع الكائنات الحية عديمة الأطراف، بدءًا من الثعابين الكبيرة وحتى الديدان الخيطية المجهرية المتواضعة، تحقق الانحناءات ليس من خلال نظام محرك مشترك دوراني واحد، ولكن بدلاً من ذلك من خلال شريطين من العضلات على جانبي الجسم.
بالنسبة للمهندس، يبدو هذا التصميم غير بديهي. لماذا نتحكم في شيء ما باستخدام عضلتين أو محركين بينما يمكن للمرء القيام بهذه المهمة؟
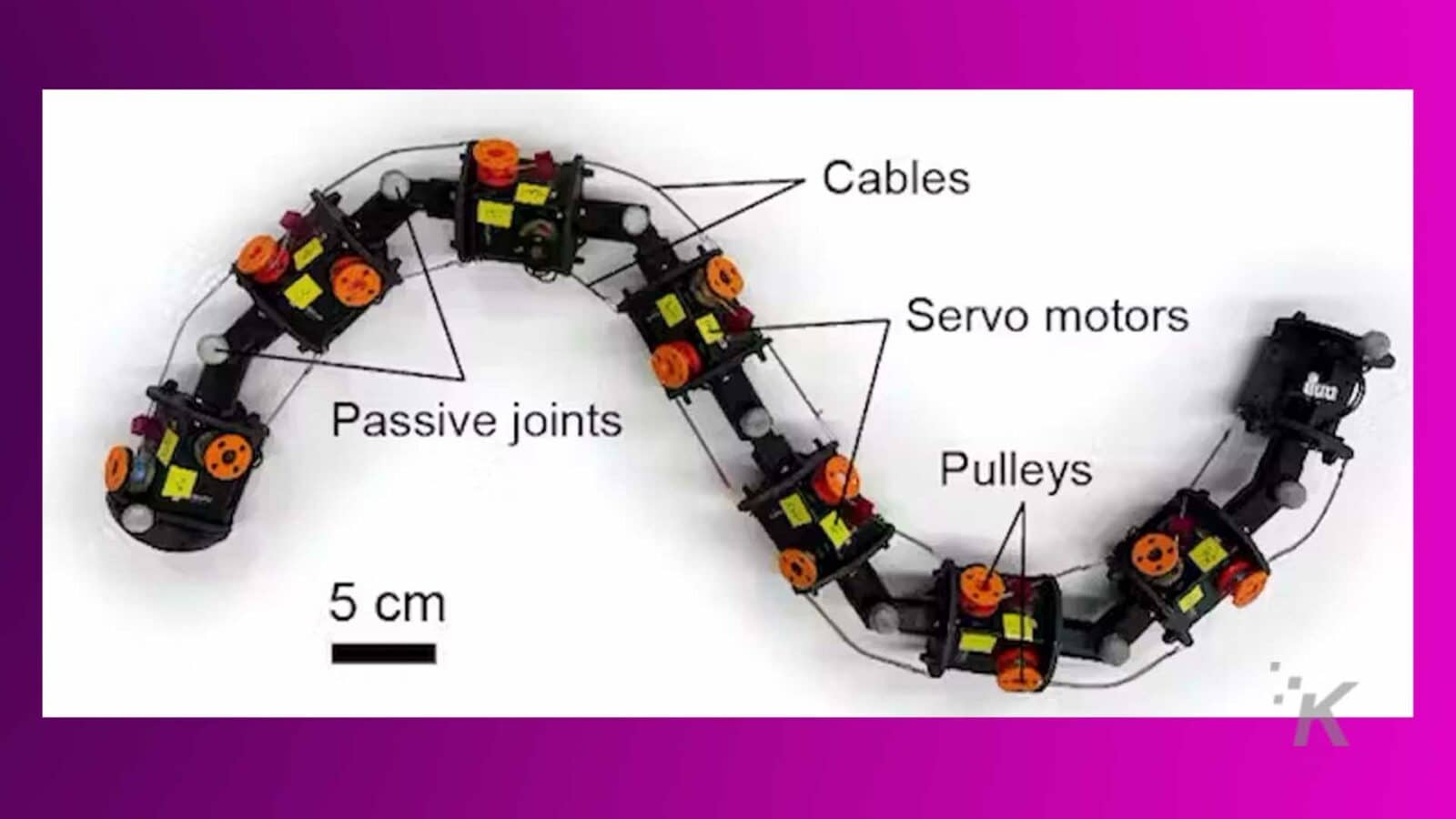
للوصول إلى جوهر هذا السؤال، قام فريقنا ببناء روبوت جديد يسمى MILLR، وهو روبوت ذكي ميكانيكيًا بلا أطراف، مستوحى من شريطي العضلات الموجودين على الثعابين والديدان.
لدى MILLR كبلان يتم التحكم فيهما بشكل مستقل، حيث يقومان بسحب كل مفصل إلى اليسار واليمين بشكل ثنائي.
لقد وجدنا أن هذه الطريقة تسمح للروبوت بالتحرك تلقائيًا حول العوائق دون الحاجة إلى استشعار محيطه وتغيير وضع جسمه بشكل فعال ليتوافق مع البيئة.
بناء روبوت ذكي ميكانيكيا
بدلاً من محاكاة التشريح العضلي التفصيلي لكائن معين، تطبق MILLR القوى على جانبي الجسم عن طريق لف الكابل وفكه.
وبهذه الطريقة، فهو يعكس أساليب تنشيط العضلات التي تستخدمها الثعابين والديدان الخيطية، حيث يتناوب الجانبان الأيمن والأيسر في التنشيط.
يقوم وضع التنشيط هذا بسحب الجسم نحو جانب أو آخر عن طريق شد أحد الجانبين، بينما يسترخي الجانب الآخر ويتم سحبه بشكل سلبي.
ومن خلال تغيير مقدار الارتخاء في الكابلات، يمكننا تحقيق درجات متفاوتة من صلابة الجسم.
عندما يصطدم الروبوت بعائق، اعتمادًا على شد الكابل، فإنه يحافظ بشكل انتقائي على شكله أو ينحني تحت قوة العائق.
لقد وجدنا أنه إذا كان الروبوت ينحني بشكل نشط إلى جانب واحد ويتعرض لقوة في نفس الاتجاه، فإن الجسم يمتثل للقوة وينحني أكثر.
وبدلاً من ذلك، إذا تعرض الروبوت لقوة تعارض الانحناء، فسيظل جامدًا ويدفع نفسه بعيدًا عن العائق.
نظرًا لنمط التوتر على طول الجسم، فإن الاصطدامات المباشرة التي عادةً ما تتسبب في توقف الروبوت عن الحركة أو تشويش نفسه تؤدي بشكل طبيعي إلى إعادة التوجيه حول العائق.
يمكن للروبوت أن يدفع نفسه للأمام باستمرار.
اختبار ميلر
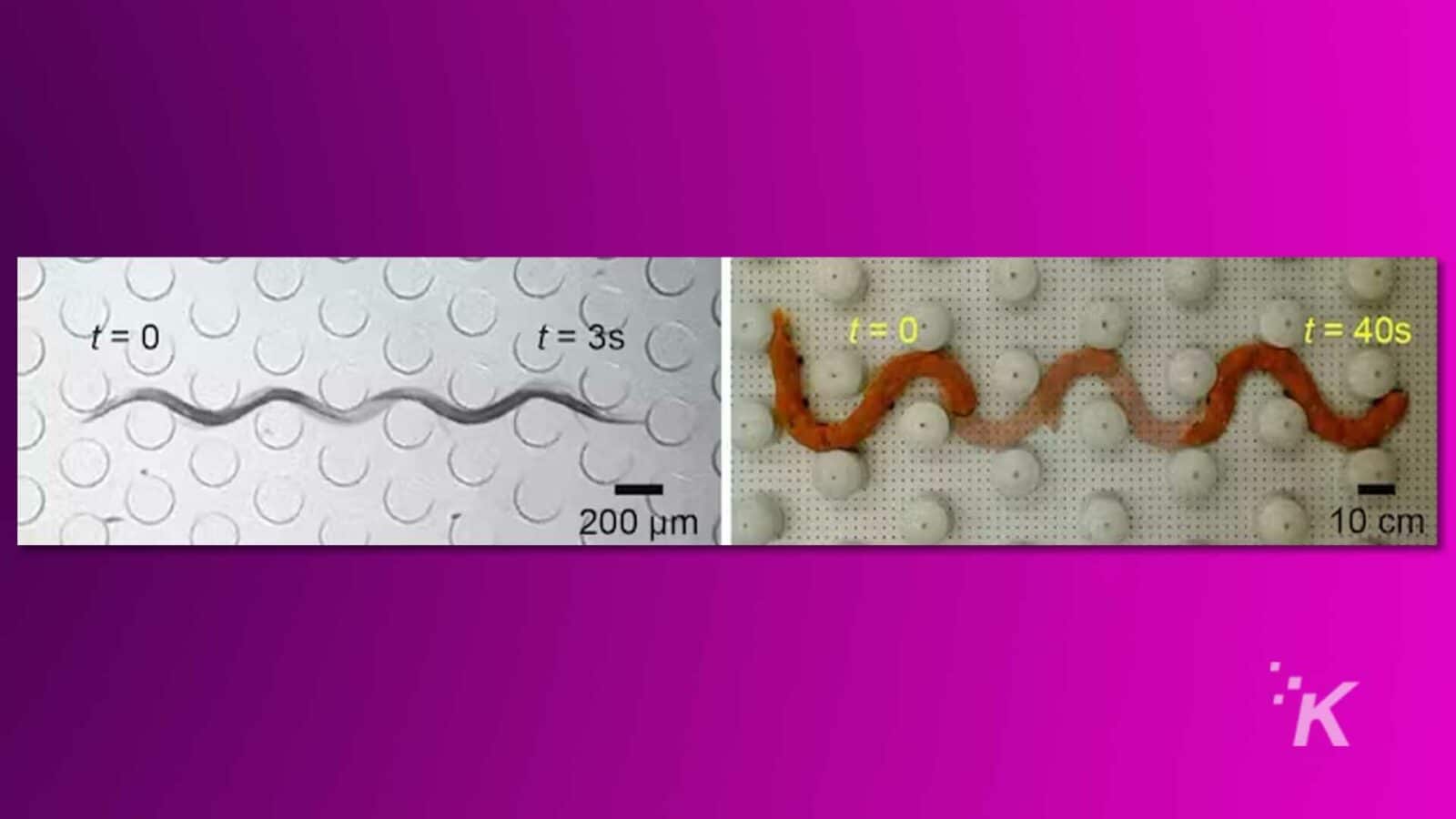
وللتحقق من فوائد الذكاء الميكانيكي، قمنا ببناء مسارات صغيرة من العوائق وأرسلنا الديدان الخيطية من خلالها لنرى مدى جودة أدائها.
لقد أرسلنا MILLR من خلال دورة تدريبية مماثلة وقمنا بمقارنة النتائج. تحركت MILLR خلال مسارها بنفس فعالية الديدان الحقيقية.
لقد لاحظنا أن الديدان قامت بنفس نوع حركات الجسم عندما اصطدمت بالعوائق كما فعل MILLR. يمكن أن تمتد مبادئ الذكاء الميكانيكي إلى ما هو أبعد من عالم الديدان الخيطية.
يمكن أن تنظر الأبحاث المستقبلية في تصميم الروبوتات بناءً على مجموعة من الأنواع الأخرى من الكائنات الحية لتطبيقات تتراوح بين البحث والإنقاذ واستكشاف الكواكب الأخرى.
توصيات المحررين:
- خصوصية البيانات، مثل الأبوة والأمومة، هي جهد جماعي
- بقاء ChatGPT على المحك في دعوى قضائية لصحيفة نيويورك تايمز
- يعكس البشر وChatGPT أنماط اللغة المتبادلة - وإليك الطريقة
- إن ChatGPT واللغات الأخرى التي تعتمد على الذكاء الاصطناعي غير عقلانية مثلنا تمامًا
ملاحظة المحرر: كتب هذا المقال تيانيو وانغ، دكتوراه. طالب في الروبوتات، معهد جورجيا للتكنولوجيا وكريستوفر بيرس، باحث ما بعد الدكتوراه في الفيزياء، معهد جورجيا للتكنولوجيا، وأعيد نشره من The Conversation بموجب ترخيص المشاع الإبداعي. اقرأ المادة الأصلية ه.