
Wurmähnliche Roboter werden bald zukünftige Such- und Rettungsteams unterstützen
Veröffentlicht: 2024-02-25Seit Jahrzehnten versuchen Wissenschaftler, schlangenartige Roboter ohne Gliedmaßen zu bauen. Diese Roboter könnten sich in Such- und Rettungssituationen als nützlich erweisen, wenn sie durch eingestürzte Gebäude navigieren, um Überlebende zu finden und ihnen zu helfen.
Mit schlanken, flexiblen Körpern könnten sich Roboter ohne Gliedmaßen problemlos durch enge und überfüllte Räume wie Trümmerfelder bewegen, wo Lauf- oder Radroboter und menschliche Retter oft versagen.
Allerdings sind selbst die fortschrittlichsten Roboter ohne Gliedmaßen nicht annähernd in der Lage, sich in schwierigem Gelände mit der Beweglichkeit und Vielseitigkeit von Würmern und Schlangen fortzubewegen.
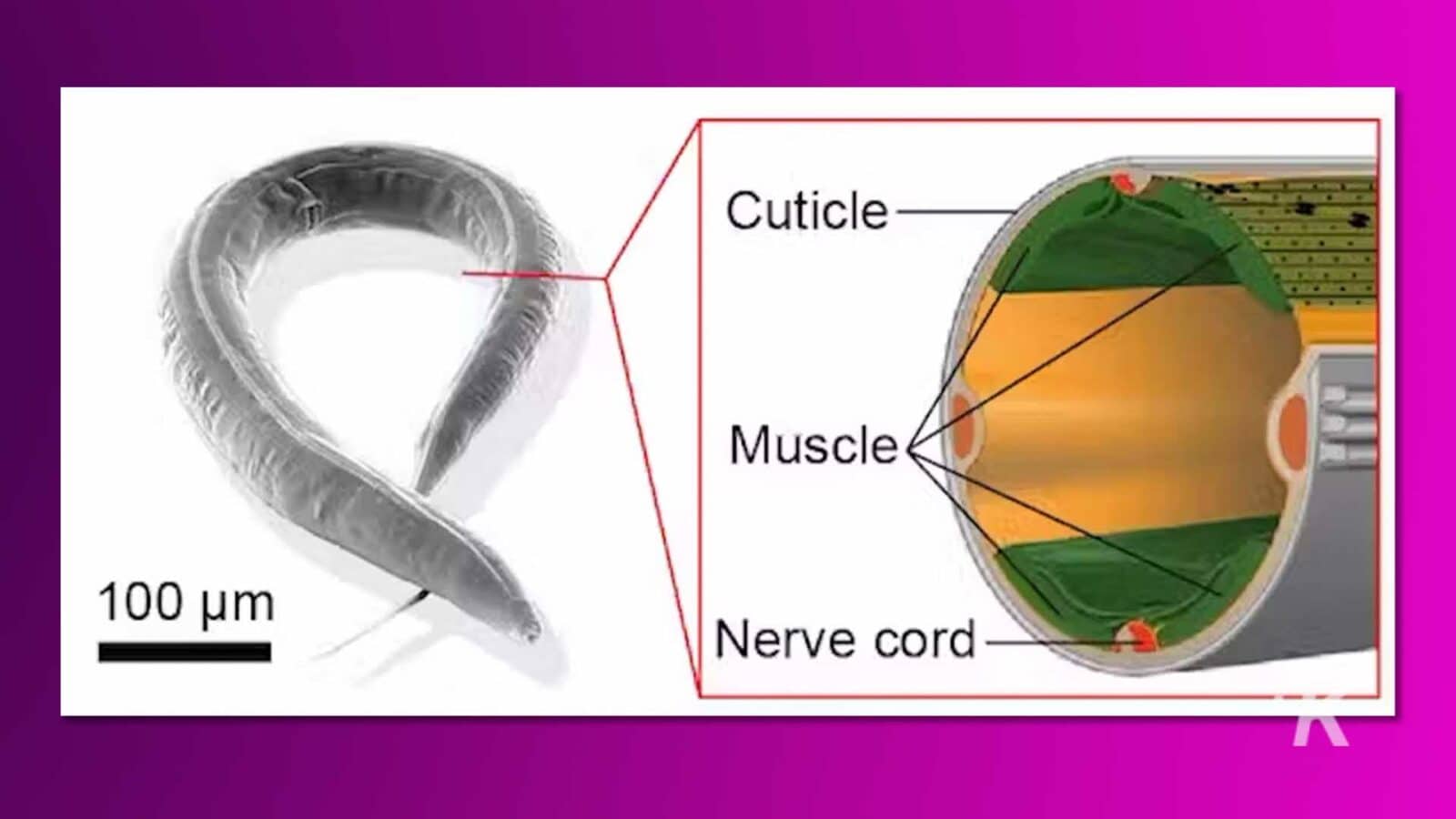
Sogar der winzige Fadenwurm Caenorhabditis elegans , der über ein relativ einfaches Nervensystem verfügt, kann sich durch schwierige physische Umgebungen navigieren.
Als Teil eines Teams aus Ingenieuren, Robotikern und Physikern wollten wir diese Leistungsdiskrepanz untersuchen. Aber anstatt die Antwort auf die Neurowissenschaften zu richten, wandten wir uns der Biomechanik zu.
Wir wollten ein Robotermodell bauen, das seinen Körper mithilfe eines Mechanismus antreibt, der dem ähnelt, wie Würmer und Schlangen ihre Bewegung antreiben.
Undulatoren und mechanische Intelligenz
Im Laufe der Jahrtausende haben Organismen komplexe Nervensysteme entwickelt, die es ihnen ermöglichen, ihre physische Umgebung wahrzunehmen, diese Informationen zu verarbeiten und präzise Körperbewegungen auszuführen, um Hindernisse zu umgehen.
In der Robotik entwerfen Ingenieure Algorithmen, die Informationen von Sensoren am Körper des Roboters – einer Art Roboternervensystem – aufnehmen und diese Informationen nutzen, um zu entscheiden, wie er sich bewegt. Diese Algorithmen und Systeme sind in der Regel komplex.
Unser Team wollte einen Weg finden, diese Systeme zu vereinfachen, indem es mechanisch gesteuerte Ansätze zum Umgang mit Hindernissen hervorhob, die keine Sensoren oder Berechnungen erfordern. Dazu haben wir uns Beispiele aus der Biologie zugewandt.
Tiere verlassen sich bei der Bewegungssteuerung nicht ausschließlich auf ihre Neuronen – Gehirnzellen und periphere Nerven.
Sie nutzen auch die physikalischen Eigenschaften ihres Körpers – zum Beispiel die Elastizität ihrer Muskeln –, um spontan auf ihre Umgebung zu reagieren, bevor ihre Neuronen überhaupt die Chance haben zu reagieren.
Während Rechensysteme den Gesetzen der Mathematik unterliegen, unterliegen mechanische Systeme der Physik. Um die gleiche Aufgabe zu lösen, können Wissenschaftler entweder einen Algorithmus entwerfen oder ein physikalisches System sorgfältig entwerfen.
Beispielsweise bewegen sich Roboter und Tiere ohne Gliedmaßen durch die Welt, indem sie Teile ihres Körpers nach links und rechts beugen, eine Art Bewegung, die als Wellen bezeichnet wird.
Wenn sie mit einem Hindernis kollidieren, müssen sie sich abwenden und umfahren, indem sie sich mehr zur einen Seite als zur anderen beugen. Wissenschaftler könnten dies mit einem Roboter erreichen, indem sie Sensoren an dessen Kopf oder Körper anbringen.
Sie könnten dann einen Algorithmus entwerfen, der dem Roboter sagt, dass er sich abwenden oder um das Hindernis herumwinden soll, wenn er eine ausreichend große Kraft auf seinen Kopf oder Körper „spürt“.
Alternativ könnten Wissenschaftler die Materialien des Roboters sowie die Anordnung und Stärke seiner Motoren sorgfältig auswählen, sodass bei Kollisionen spontan eine Körperform entsteht, die zu einer Drehung führt.
Dieser Roboter hätte das, was Wissenschaftler „mechanische Intelligenz“ nennen.
Wenn Wissenschaftler wie wir verstehen können, wie der Körper von Organismen mechanisch auf den Kontakt mit Objekten in ihrer Umgebung reagiert, können wir bessere Roboter entwickeln, die mit Hindernissen umgehen können, ohne komplexe Algorithmen programmieren zu müssen.
Wenn man eine vielfältige Gruppe wellenförmiger Organismen mit dem immer größer werdenden Zoo robotischer „Schlangen“ vergleicht, fällt ein Unterschied zwischen Robotern und biologischen Undulatoren auf.
Fast alle wellenförmigen Roboter beugen ihren Körper mithilfe einer Reihe verbundener Segmente mit Motoren an jedem Gelenk. Aber so verbiegen sich lebende Organismen nicht.
Im Gegensatz dazu erreichen alle Organismen ohne Gliedmaßen, von der großen Schlange bis zum kleinen, mikroskopisch kleinen Fadenwurm, Beugungen nicht durch ein einziges rotierendes Gelenk-Motor-System, sondern durch zwei Muskelbänder auf beiden Seiten des Körpers.
Für einen Ingenieur erscheint dieses Design kontraintuitiv. Warum etwas mit zwei Muskeln oder Motoren steuern, wenn man die Aufgabe auch erledigen könnte?
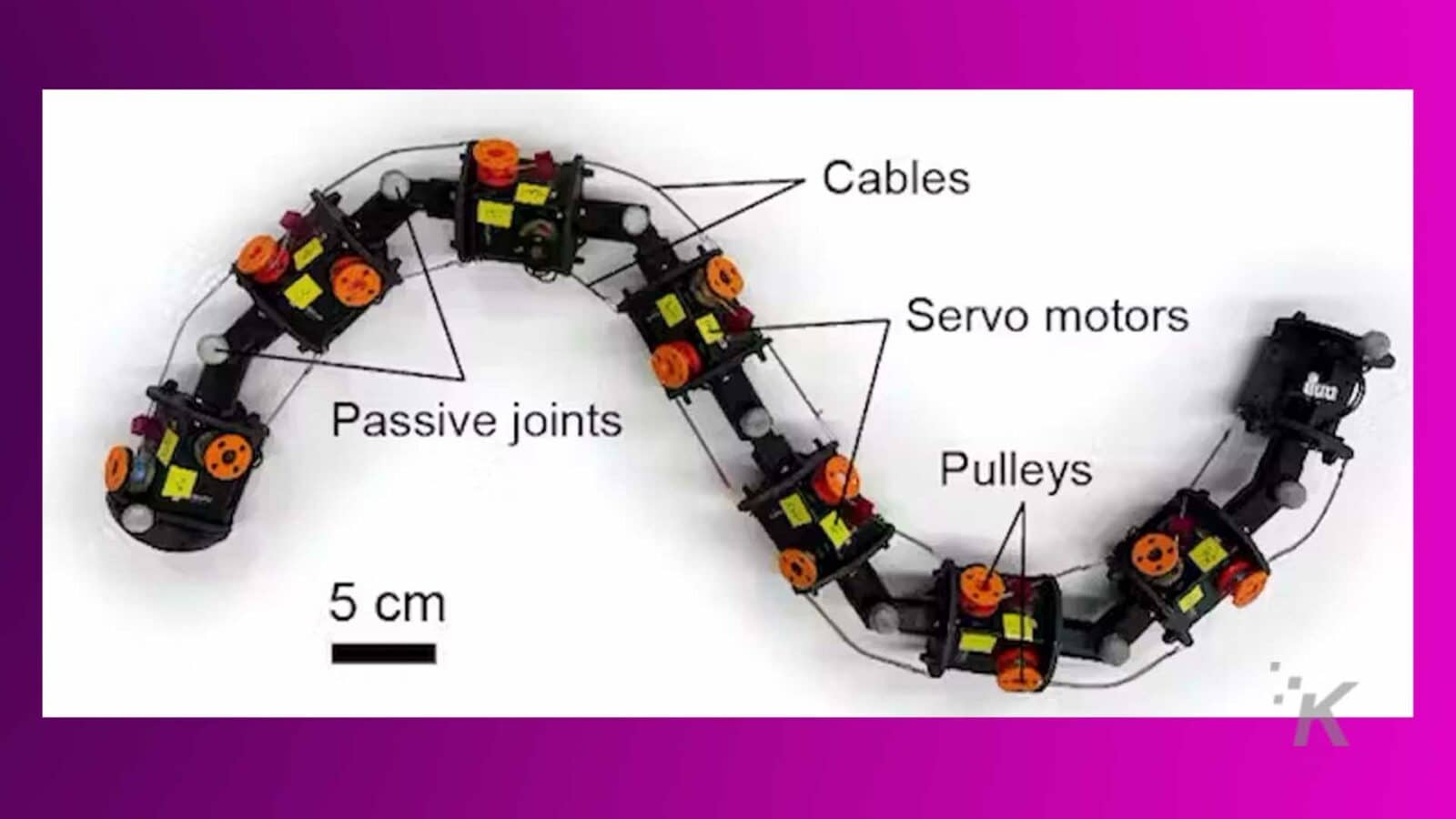
Um dieser Frage auf den Grund zu gehen, hat unser Team einen neuen Roboter namens MILLR gebaut, einen mechanisch intelligenten Roboter ohne Gliedmaßen, der von den beiden Muskelbändern von Schlangen und Würmern inspiriert ist.
MILLR verfügt über zwei unabhängig gesteuerte Kabel, die jedes Gelenk beidseitig nach links und rechts ziehen.
Wir haben festgestellt, dass diese Methode es dem Roboter ermöglicht, sich spontan um Hindernisse herum zu bewegen, ohne seine Umgebung wahrnehmen und seine Körperhaltung aktiv ändern zu müssen, um sich an die Umgebung anzupassen.
Bau eines mechanisch intelligenten Roboters
Anstatt die detaillierte Muskelanatomie eines bestimmten Organismus nachzuahmen, übt MILLR Kräfte auf beide Körperseiten aus, indem es ein Kabel auf- und abwickelt.
Auf diese Weise spiegelt es die Muskelaktivierungsmethoden wider, die Schlangen und Nematoden verwenden, wobei die linke und die rechte Seite abwechselnd aktivieren.
Dieser Aktivierungsmodus zieht den Körper durch Anspannung auf einer Seite zur einen oder anderen Seite, während die andere Seite entspannt und passiv mitgezogen wird.
Indem wir den Durchhang der Kabel verändern, können wir unterschiedliche Grade an Körpersteifigkeit erreichen.
Wenn der Roboter mit einem Hindernis kollidiert, behält er je nach Seilspannung wahlweise seine Form bei oder biegt sich unter der Kraft des Hindernisses.
Wir fanden heraus, dass der Körper der Kraft nachkam und sich weiter beugte, wenn sich der Roboter aktiv zu einer Seite beugte und eine Kraft in die gleiche Richtung erfuhr.
Würde dagegen auf den Roboter eine Kraft wirken, die der Biegung entgegenwirkt, bleibt er starr und stößt sich vom Hindernis ab.
Aufgrund des Spannungsmusters entlang des Körpers führten Frontalzusammenstöße, die normalerweise dazu führen würden, dass sich der Roboter nicht mehr bewegt oder sich selbst blockiert, stattdessen natürlich zu einer Umlenkung um das Hindernis herum.
Der Roboter konnte sich konsequent vorwärts bewegen.
MILLR testen
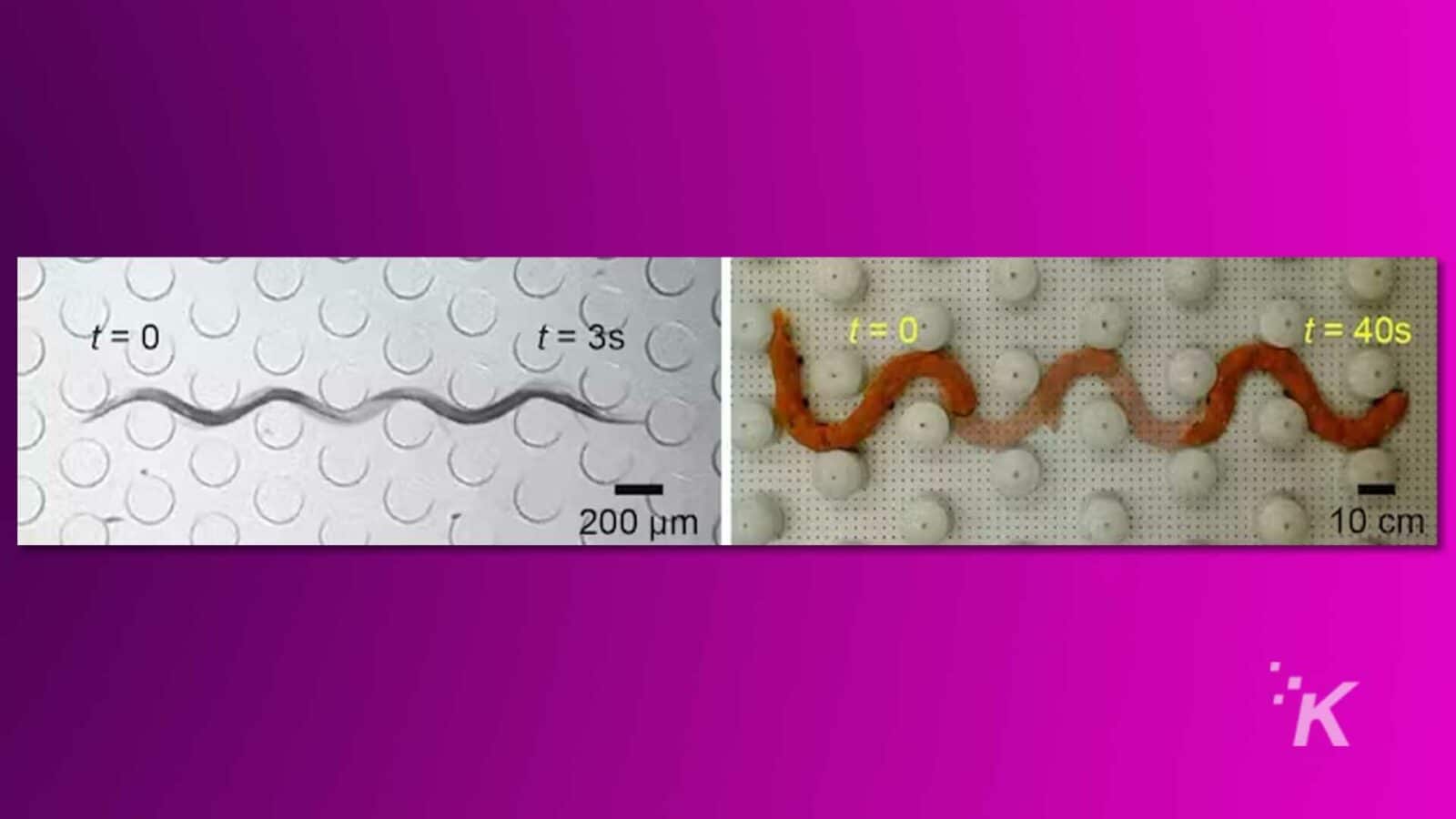
Um die Vorteile mechanischer Intelligenz zu untersuchen, haben wir winzige Hindernisparcours gebaut und Fadenwürmer durch sie geschickt, um zu sehen, wie gut sie funktionieren.
Wir haben MILLR einem ähnlichen Kurs unterzogen und die Ergebnisse verglichen. MILLR bewegte sich durch seinen Lauf ungefähr so effektiv wie die echten Würmer.
Wir haben festgestellt, dass die Würmer beim Zusammenstoß mit Hindernissen die gleichen Körperbewegungen ausführten wie MILLR. Die Prinzipien der mechanischen Intelligenz könnten über den Bereich der Nematoden hinausgehen.
Zukünftige Forschungen könnten sich mit der Entwicklung von Robotern befassen, die auf einer Vielzahl anderer Arten von Organismen basieren und für Anwendungen geeignet sind, die von Such- und Rettungsaktionen bis hin zur Erkundung anderer Planeten reichen.
Empfehlungen der Redaktion:
- Datenschutz ist, wie Elternschaft, eine kollektive Anstrengung
- Das Überleben von ChatGPT steht in der Klage der New York Times auf dem Spiel
- Menschen und ChatGPT spiegeln gemeinsame Sprachmuster wider – so geht's
- ChatGPT und andere Sprach-KIs sind genauso irrational wie wir
Anmerkung des Herausgebers: Dieser Artikel wurde von Tianyu Wang, Ph.D., verfasst. Student in Robotik, Georgia Institute of Technology und Christopher Pierce, Postdoktorand in Physik, Georgia Institute of Technology, und erneut veröffentlicht von The Conversation unter einer Creative Commons-Lizenz. Lesen Sie den Originalartikel e.