
ミミズのようなロボットが間もなく将来の捜索救助チームを支援するようになる
公開: 2024-02-25科学者たちは何十年もの間、ヘビのような手足のないロボットの構築を試みてきた。 これらのロボットは、倒壊した建物の中を移動して生存者を見つけて支援するなど、捜索救助の場面で役立つ可能性がある。
手足のないロボットは、細くて柔軟な体を備えているため、歩行型ロボットや車輪付きロボットや人間の救助者が失敗しがちな、がれき原などの狭く雑然とした空間を容易に移動できる。
しかし、最先端の手足のないロボットでさえ、困難な地形でのミミズやヘビのような機敏性と多用途性での移動には及ばない。
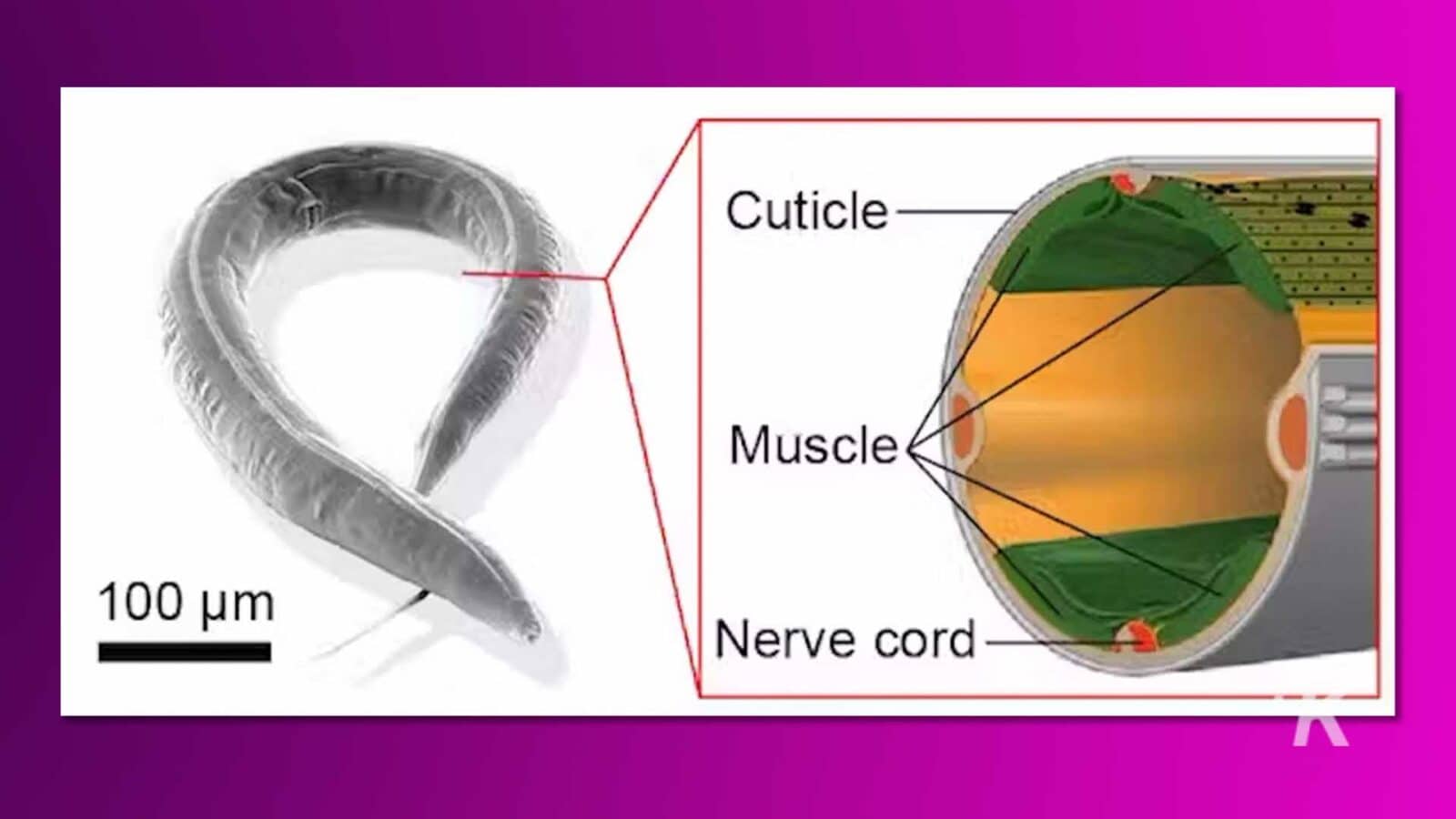
比較的単純な神経系を持つ小さな線虫Caenorhabditis elegansでさえ、困難な物理的環境を通り抜けることができます。
エンジニア、ロボット工学者、物理学者のチームの一員として、私たちはこのパフォーマンスの差異を調査したいと考えました。 しかし、私たちは神経科学に答えを求める代わりに、生体力学に目を向けました。
私たちは、ミミズやヘビが動きに動力を与えるのと同じメカニズムを使用して、その体を駆動するロボット モデルの構築に着手しました。
アンジュレータと機械的インテリジェンス
何千年にもわたって、生物は複雑な神経系を進化させてきました。これにより、物理的な環境を感知し、その情報を処理し、障害物を回避するための正確な体の動きを実行できるようになります。
ロボット工学では、エンジニアはロボットの神経系の一種であるロボットの体のセンサーから情報を取り込み、その情報を使用して動作方法を決定するアルゴリズムを設計します。 これらのアルゴリズムとシステムは通常、複雑です。
私たちのチームは、センサーや計算を必要とせずに障害物に対処するための機械的に制御されたアプローチに焦点を当て、これらのシステムを簡素化する方法を見つけたいと考えていました。 そのために、私たちは生物学の例に目を向けました。
動物は、運動を制御するためにニューロン(脳細胞と末梢神経)だけに依存しているわけではありません。
また、ニューロンが反応する前に、体の物理的特性 (筋肉の弾力性など) を利用して、環境に自発的に反応できるようにします。
計算システムは数学の法則に支配されますが、機械システムは物理学に支配されます。 同じタスクを達成するために、科学者はアルゴリズムを設計するか、物理システムを注意深く設計することができます。
たとえば、手足のないロボットや動物は、体の一部を左右に曲げることによって世界を移動します。これは波打ちと呼ばれる動きの一種です。
障害物に衝突した場合は、方向を変え、片側よりも片側に大きく曲がって障害物を回避しなければなりません。 科学者はロボットの頭または体にセンサーを取り付けることでこれを実現できます。
その後、ロボットが頭や体に十分な大きさの力を「感じた」場合、ロボットに背を向けるか、障害物に巻きつくように指示するアルゴリズムを設計できるだろう。
あるいは、科学者がロボットの材質やモーターの配置と強度を慎重に選択して、衝突によって自発的に回転につながる車体形状が生成されるようにすることもできるだろう。
このロボットは科学者が「機械的知能」と呼ぶものを備えることになる。
私たちのような科学者が、環境内の物体との接触に対して生物の体がどのように機械的に反応するかを理解できれば、複雑なアルゴリズムをプログラムすることなく、障害物に対処できるより優れたロボットを設計できるようになります。
多様な起伏のある生物のセットと、ますます大規模化するロボット「ヘビ」の動物園を比較すると、ロボットと生物学的な起伏のある生物の間には 1 つの違いが際立ちます。
ほぼすべての波動ロボットは、各関節にモーターを備えた一連の接続されたセグメントを使用して体を曲げます。 しかし、生物はそうは曲がりません。
対照的に、大きなヘビから卑劣な微細な線虫に至るまで、すべての手足のない生物は、単一の回転関節運動システムからではなく、体の両側にある 2 つの筋肉の帯を介して屈曲を実現します。
エンジニアにとって、この設計は直感に反するように思えます。 1 つで仕事ができるのに、なぜ 2 つの筋肉やモーターで何かを制御するのでしょうか?
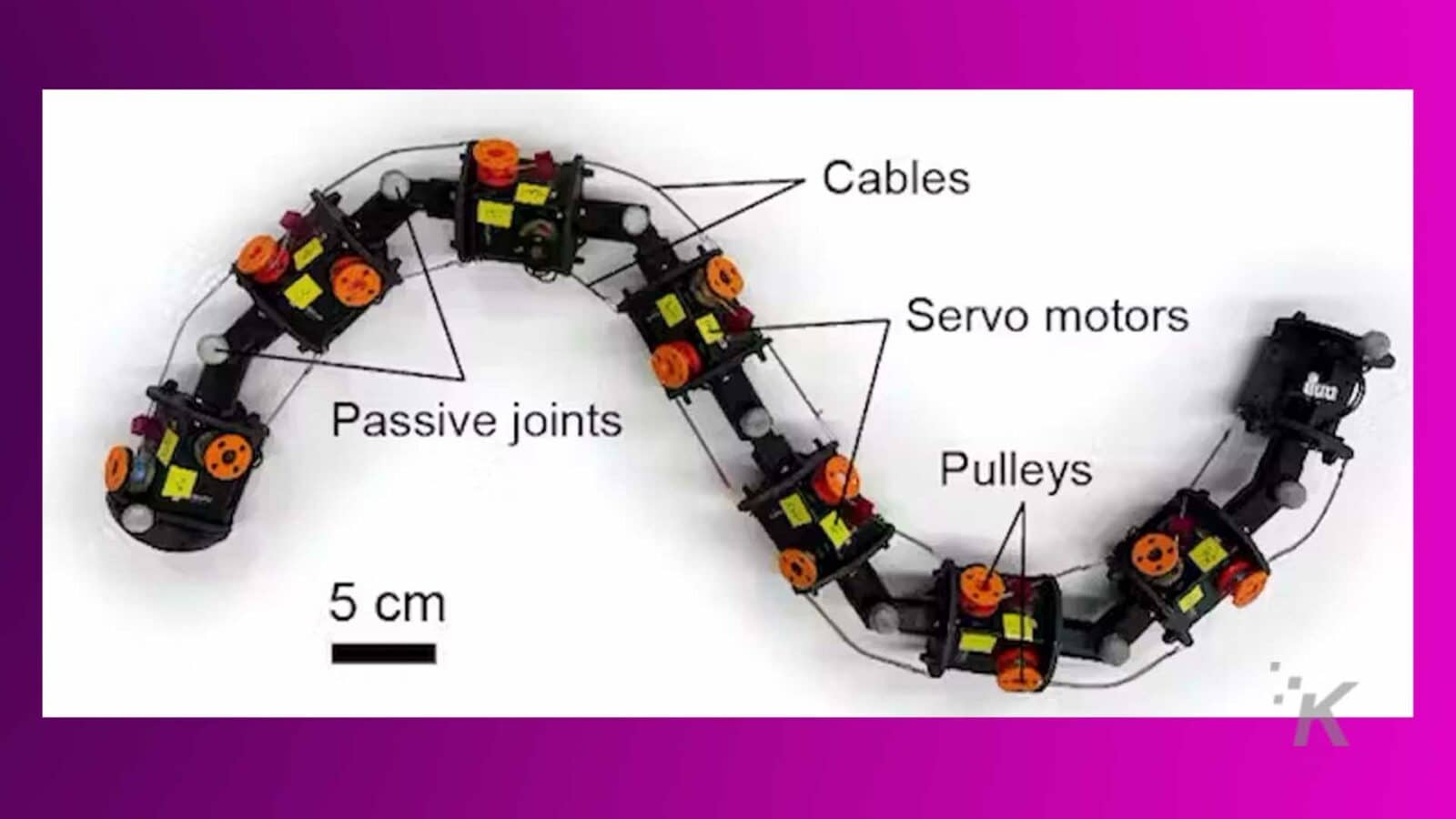
この疑問の真相に迫るために、私たちのチームは、ヘビとミミズの 2 つの筋肉帯にヒントを得て、機械的に知的な手足のないロボットである MILLR と呼ばれる新しいロボットを構築しました。
MILLR には、各関節を左右両側に引っ張る、独立して制御される 2 本のケーブルがあります。
この方法により、ロボットが周囲を感知することなく自発的に障害物を回避し、環境に応じて積極的に体の姿勢を変えることができることがわかりました。
機械的にインテリジェントなロボットの構築
MILLR は、特定の生物の詳細な筋肉の解剖学的構造を模倣するのではなく、ケーブルを巻き取ったり巻き戻したりすることで体の両側に力を加えます。
このようにして、ヘビや線虫が使用する筋肉の活性化方法を反映しており、左側と右側が交互に活性化します。
この活性化モードは、片側を締めることによって身体をどちらかの側に引っ張り、もう一方の側はリラックスして受動的に引っ張られます。
ケーブルのたるみ量を変えることで、さまざまな程度のボディ剛性を実現できます。
ロボットが障害物に衝突すると、ケーブルの張力に応じて、その形状を維持するか、障害物の力を受けて曲がります。
ロボットが片側に積極的に曲がっているときに同じ方向に力が加わった場合、体はその力に応じてさらに曲がることがわかりました。
あるいは、ロボットが曲げに対抗する力を受けた場合、ロボットは剛性を維持し、障害物から押しのけられます。
体に沿った張力のパターンにより、通常ならロボットが動きを停止したり、ロボット自身が動かなくなったりするような正面衝突が、自然に障害物を迂回する方向転換をもたらしました。
ロボットは一貫して前進することができました。
MILLRのテスト
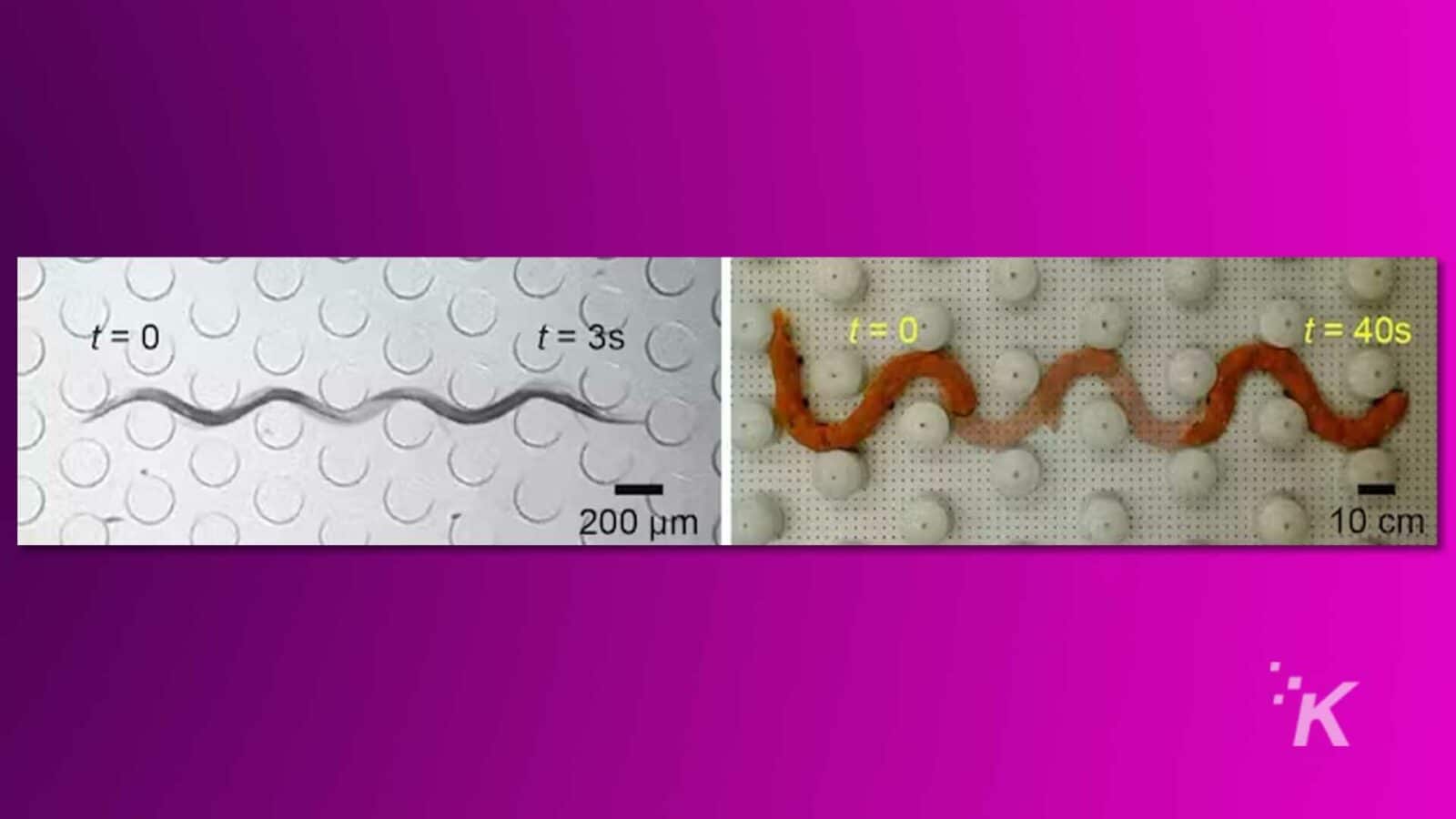
機械知能の利点を調査するために、私たちは小さな障害物コースを構築し、そこに線虫を送り込み、それらがどの程度うまく機能するかを確認しました。
私たちはMILLRを同様のコースに通わせ、結果を比較しました。 MILLR は、本物のワームとほぼ同じくらい効果的にそのコースを移動しました。
私たちは、ワームが障害物に衝突したときに MILLR と同じ種類の体の動きをすることに気づきました。 機械的知能の原理は、線虫の領域を超えて拡張される可能性があります。
将来の研究では、捜索救助から他の惑星の探索に至るまで、さまざまな種類の生物をベースにしたロボットの設計が検討される可能性がある。
編集者のおすすめ:
- データプライバシーは子育てと同様、集団的な取り組みです
- ニューヨーク・タイムズ訴訟でChatGPTの存続が危うくなる
- 人間と ChatGPT は相互の言語パターンを反映します - その方法は次のとおりです
- ChatGPT や他の言語 AI も私たちと同じように非合理的です
編集者注:この記事は、Tianyu Wang 博士によって書かれました。 ジョージア工科大学のロボット工学の学生、およびジョージア工科大学の物理学博士研究員クリストファー・ピアース。クリエイティブ コモンズ ライセンスに基づいて The Conversation から再公開されました。 元の記事を読んでください。