
Robots parecidos a gusanos pronto ayudarán a los futuros equipos de búsqueda y rescate
Publicado: 2024-02-25Los científicos llevan décadas intentando construir robots sin extremidades con forma de serpientes. Estos robots podrían resultar útiles en situaciones de búsqueda y rescate, donde podrían navegar por edificios derrumbados para encontrar y ayudar a los supervivientes.
Con cuerpos delgados y flexibles, los robots sin extremidades podrían moverse fácilmente a través de espacios reducidos y abarrotados, como campos de escombros, donde los robots que caminan o con ruedas y los rescatistas humanos tienden a fallar.
Sin embargo, ni siquiera los robots sin extremidades más avanzados han logrado moverse con la agilidad y versatilidad de los gusanos y las serpientes en terrenos difíciles.
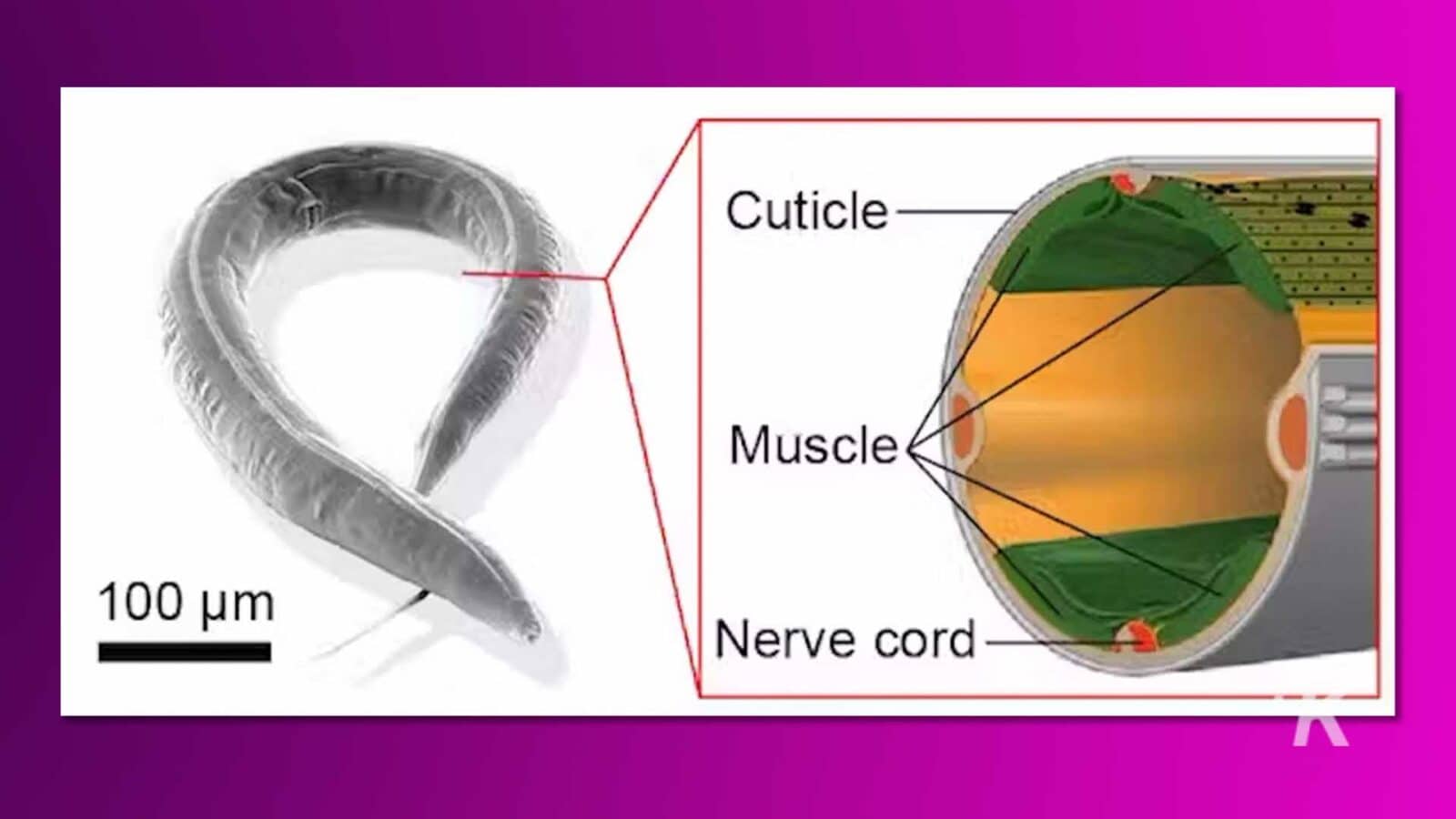
Incluso el diminuto gusano nematodo Caenorhabditis elegans , que tiene un sistema nervioso relativamente simple, puede navegar en entornos físicos difíciles.
Como parte de un equipo de ingenieros, robóticos y físicos, queríamos explorar esta discrepancia en el rendimiento. Pero en lugar de buscar una respuesta en la neurociencia, recurrimos a la biomecánica.
Nos propusimos construir un modelo de robot que impulsara su cuerpo mediante un mecanismo similar al que utilizan los gusanos y las serpientes para impulsar su movimiento.
Onduladores e inteligencia mecánica
A lo largo de miles de años, los organismos han desarrollado sistemas nerviosos intrincados que les permiten sentir su entorno físico, procesar esta información y ejecutar movimientos corporales precisos para sortear obstáculos.
En robótica, los ingenieros diseñan algoritmos que toman información de los sensores del cuerpo del robot (un tipo de sistema nervioso robótico) y utilizan esa información para decidir cómo moverse. Estos algoritmos y sistemas suelen ser complejos.
Nuestro equipo quería encontrar una manera de simplificar estos sistemas destacando enfoques controlados mecánicamente para lidiar con obstáculos que no requieren sensores ni computación. Para ello, recurrimos a ejemplos de la biología.
Los animales no dependen únicamente de sus neuronas (células cerebrales y nervios periféricos) para controlar el movimiento.
También utilizan las propiedades físicas de su cuerpo (por ejemplo, la elasticidad de sus músculos) para ayudarles a reaccionar espontáneamente a su entorno, antes de que sus neuronas tengan siquiera la oportunidad de responder.
Mientras que los sistemas computacionales se rigen por las leyes de las matemáticas, los sistemas mecánicos se rigen por la física. Para lograr la misma tarea, los científicos pueden diseñar un algoritmo o diseñar cuidadosamente un sistema físico.
Por ejemplo, los robots y animales sin extremidades se mueven por el mundo doblando secciones de su cuerpo hacia la izquierda y hacia la derecha, un tipo de movimiento llamado ondulación.
Si chocan con un obstáculo, tienen que darse la vuelta y rodearlo inclinándose más hacia un lado que hacia el otro. Los científicos podrían lograr esto con un robot colocando sensores en su cabeza o cuerpo.
Luego podrían diseñar un algoritmo que le indique al robot que se dé la vuelta o rodee el obstáculo cuando “sienta” una fuerza lo suficientemente grande sobre su cabeza o cuerpo.
Alternativamente, los científicos podrían seleccionar cuidadosamente los materiales del robot y la disposición y fuerza de sus motores para que las colisiones produzcan espontáneamente una forma corporal que provoque un giro.
Este robot tendría lo que los científicos llaman “inteligencia mecánica”.
Si los científicos como nosotros podemos comprender cómo los cuerpos de los organismos responden mecánicamente al contacto con los objetos de su entorno, podremos diseñar mejores robots que puedan enfrentar obstáculos sin tener que programar algoritmos complejos.
Si se compara un conjunto diverso de organismos ondulantes con el zoológico cada vez más grande de “serpientes” robóticas, destaca una diferencia entre los robots y los onduladores biológicos.
Casi todos los robots ondulatorios doblan sus cuerpos mediante una serie de segmentos conectados con motores en cada articulación. Pero no es así como se doblan los organismos vivos.
Por el contrario, todos los organismos sin extremidades, desde las grandes serpientes hasta los humildes nematodos microscópicos, logran doblarse no mediante un único sistema de articulación-motor rotacional, sino a través de dos bandas de músculos a cada lado del cuerpo.
Para un ingeniero, este diseño parece contradictorio. ¿Por qué controlar algo con dos músculos o motores cuando uno podría hacer el trabajo?
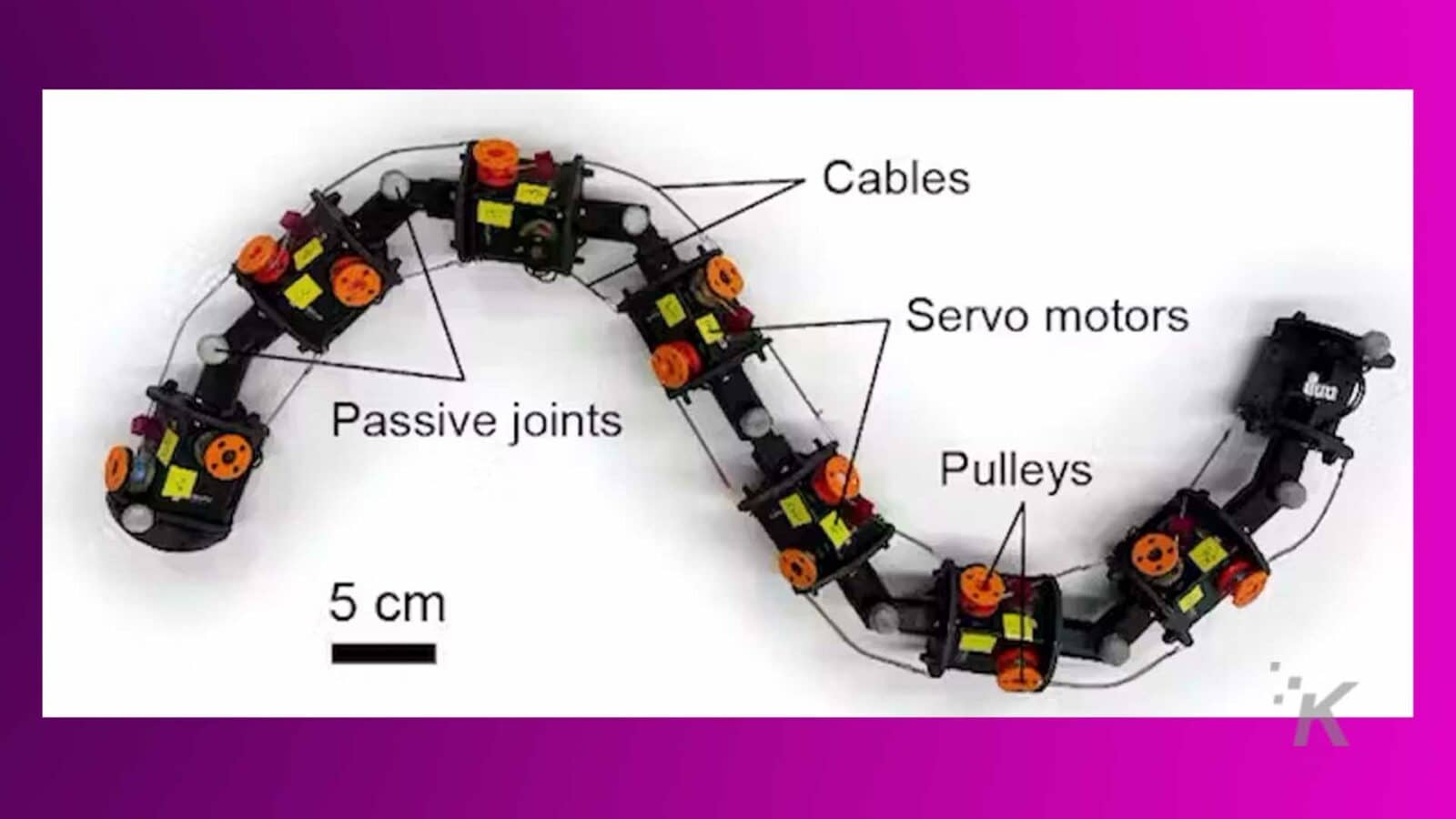
Para llegar al fondo de esta pregunta, nuestro equipo construyó un nuevo robot llamado MILLR, que significa robot sin extremidades mecánicamente inteligente, inspirado en las dos bandas de músculos de las serpientes y los gusanos.
MILLR tiene dos cables controlados independientemente que tiran de cada articulación hacia la izquierda y hacia la derecha, bilateralmente.
Descubrimos que este método permite al robot moverse espontáneamente alrededor de obstáculos sin tener que detectar su entorno y cambiar activamente su postura corporal para adaptarse al entorno.
Construyendo un robot mecánicamente inteligente
En lugar de imitar la anatomía muscular detallada de un organismo en particular, MILLR aplica fuerzas a ambos lados del cuerpo enrollando y desenrollando un cable.
De esta manera, refleja los métodos de activación muscular que utilizan las serpientes y los nematodos, donde los lados izquierdo y derecho se activan por turnos.
Este modo de activación tira del cuerpo hacia un lado u otro tensando un lado, mientras que el otro lado se relaja y es arrastrado pasivamente.
Al cambiar la cantidad de holgura de los cables, podemos lograr distintos grados de rigidez del cuerpo.
Cuando el robot choca con un obstáculo, dependiendo de la tensión del cable, mantiene selectivamente su forma o se dobla bajo la fuerza del obstáculo.
Descubrimos que si el robot se inclinaba activamente hacia un lado y experimentaba una fuerza en la misma dirección, el cuerpo obedecía la fuerza y se doblaba más.
Si, por el contrario, el robot experimentara una fuerza que se opusiera a la curva, permanecería rígido y se empujaría fuera del obstáculo.
Debido al patrón de tensión a lo largo del cuerpo, las colisiones frontales que normalmente harían que el robot dejara de moverse o se atascara, condujeron naturalmente a una redirección alrededor del obstáculo.
El robot podía avanzar de forma constante.
Prueba MILLR
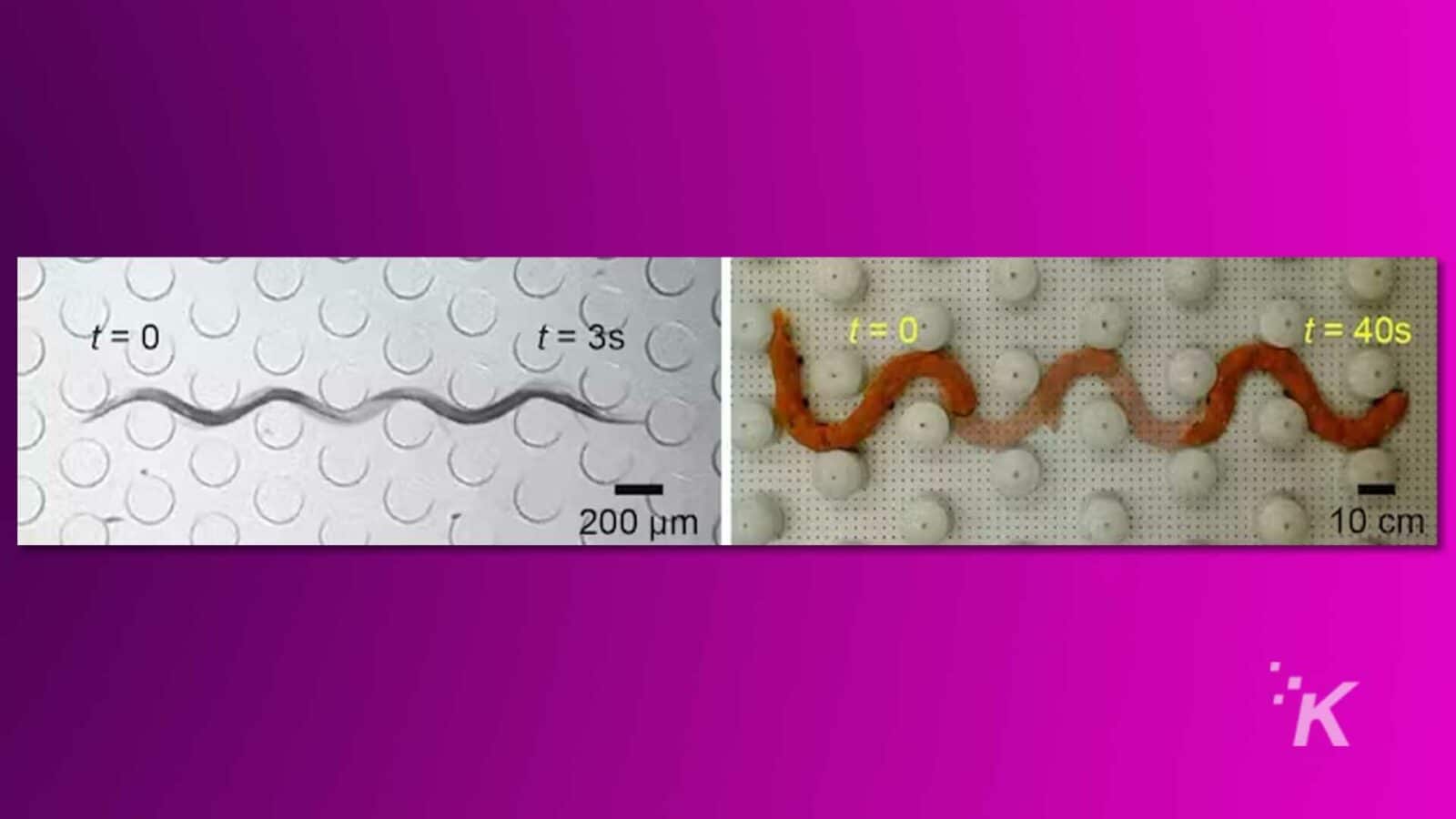
Para investigar los beneficios de la inteligencia mecánica, construimos pequeñas pistas de obstáculos y enviamos gusanos nematodos a través de ellas para ver qué tan bien se desempeñaban.
Enviamos a MILLR a un curso similar y comparamos los resultados. MILLR siguió su curso con la misma eficacia que los gusanos reales.
Notamos que los gusanos hacían el mismo tipo de movimientos corporales cuando chocaban con obstáculos que MILLR. Los principios de la inteligencia mecánica podrían extenderse más allá del ámbito de los nematodos.
Las investigaciones futuras podrían centrarse en el diseño de robots basados en una serie de otros tipos de organismos para aplicaciones que van desde la búsqueda y el rescate hasta la exploración de otros planetas.
Recomendaciones de los editores:
- La privacidad de los datos, como la paternidad, es un esfuerzo colectivo
- La supervivencia de ChatGPT en juego en la demanda del New York Times
- Los humanos y ChatGPT reflejan patrones de lenguaje mutuos: así es como
- ChatGPT y otras IA en idiomas son tan irracionales como nosotros
Nota del editor: este artículo fue escrito por Tianyu Wang, Ph.D. Estudiante de Robótica, Instituto de Tecnología de Georgia y Christopher Pierce, becario postdoctoral en Física, Instituto de Tecnología de Georgia, y republicado desde The Conversation bajo una licencia Creative Commons. Lea el artículo original e.