
Des robots ressemblant à des vers aideront bientôt les futures équipes de recherche et de sauvetage
Publié: 2024-02-25Les scientifiques tentent de construire des robots sans membres ressemblant à des serpents depuis des décennies. Ces robots pourraient s’avérer utiles dans des situations de recherche et de sauvetage, où ils pourraient naviguer dans des bâtiments effondrés pour trouver et aider les survivants.
Dotés de corps minces et flexibles, les robots sans membres pourraient facilement se déplacer dans des espaces confinés et encombrés tels que des champs de débris, où les robots à pied ou à roues et les sauveteurs humains ont tendance à échouer.
Cependant, même les robots sans membres les plus avancés sont loin de se déplacer avec l’agilité et la polyvalence des vers et des serpents sur des terrains difficiles.
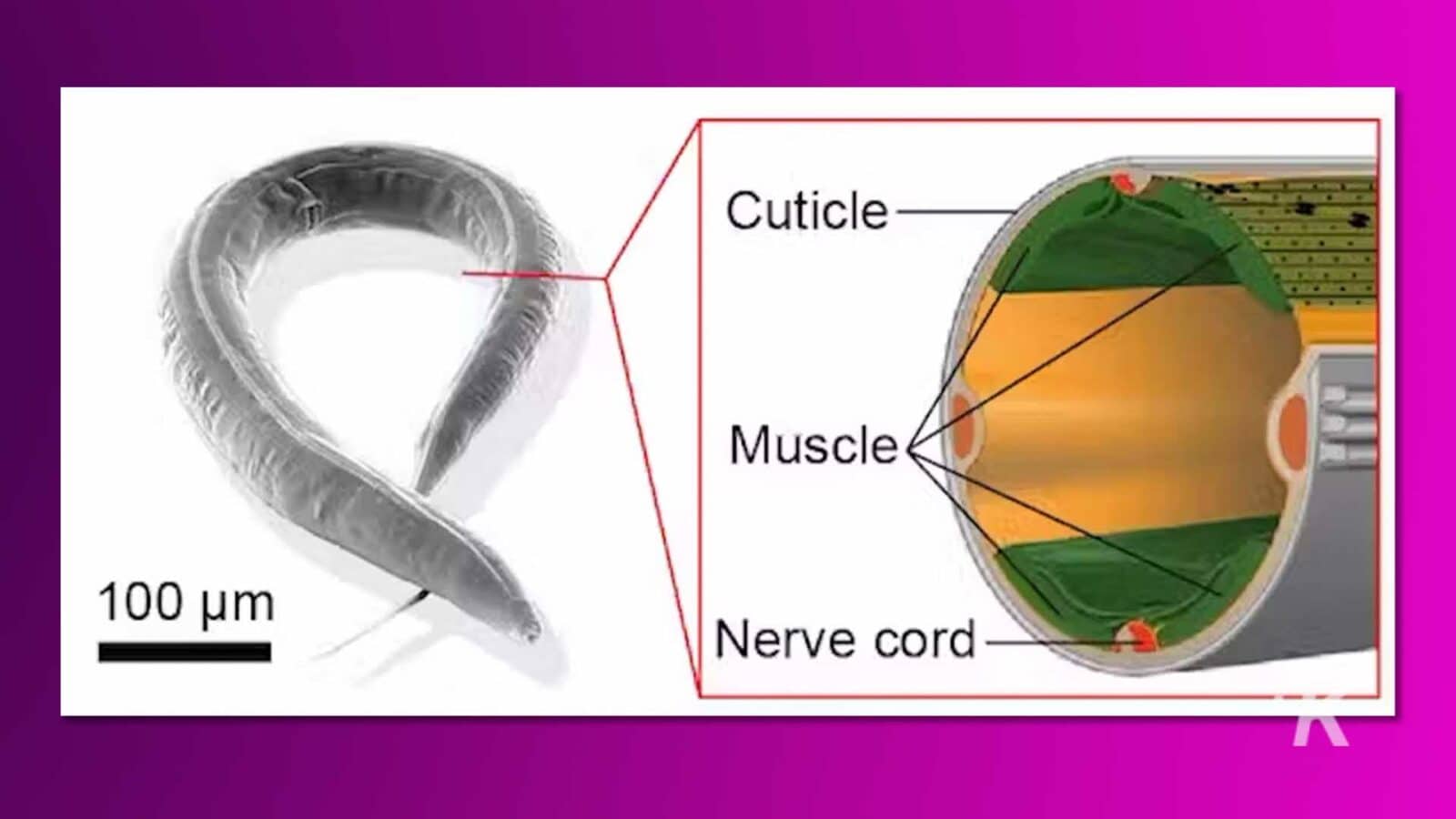
Même le petit ver nématode Caenorhabditis elegans , doté d'un système nerveux relativement simple, peut naviguer dans des environnements physiques difficiles.
En tant que membre d’une équipe d’ingénieurs, de roboticiens et de physiciens, nous avons souhaité explorer cet écart de performances. Mais au lieu de chercher une réponse dans les neurosciences, nous nous sommes tournés vers la biomécanique.
Nous avons décidé de construire un modèle de robot qui conduisait son corps à l'aide d'un mécanisme similaire à celui utilisé par les vers et les serpents pour se déplacer.
Ondulateurs et intelligence mécanique
Au fil des milliers d’années, les organismes ont développé des systèmes nerveux complexes qui leur permettent de ressentir leur environnement physique, de traiter ces informations et d’exécuter des mouvements corporels précis pour contourner les obstacles.
En robotique, les ingénieurs conçoivent des algorithmes qui captent les informations des capteurs situés sur le corps du robot – un type de système nerveux robotique – et utilisent ces informations pour décider comment se déplacer. Ces algorithmes et systèmes sont généralement complexes.
Notre équipe souhaitait trouver un moyen de simplifier ces systèmes en mettant en avant des approches contrôlées mécaniquement pour gérer les obstacles qui ne nécessitent ni capteurs ni calculs. Pour ce faire, nous nous sommes tournés vers des exemples issus de la biologie.
Les animaux ne comptent pas uniquement sur leurs neurones – cellules cérébrales et nerfs périphériques – pour contrôler leurs mouvements.
Ils utilisent également les propriétés physiques de leur corps – par exemple l’élasticité de leurs muscles – pour les aider à réagir spontanément à leur environnement, avant même que leurs neurones aient la chance de répondre.
Alors que les systèmes informatiques sont régis par les lois des mathématiques, les systèmes mécaniques sont régis par la physique. Pour accomplir la même tâche, les scientifiques peuvent soit concevoir un algorithme, soit concevoir soigneusement un système physique.
Par exemple, les robots et les animaux sans membres se déplacent à travers le monde en pliant des sections de leur corps vers la gauche et la droite, un type de mouvement appelé ondulation.
S'ils heurtent un obstacle, ils doivent se détourner et le contourner en se penchant davantage d'un côté que de l'autre. Les scientifiques pourraient y parvenir avec un robot en attachant des capteurs à sa tête ou à son corps.
Ils pourraient ensuite concevoir un algorithme qui indique au robot de se détourner ou de contourner l’obstacle lorsqu’il « sent » une force suffisamment importante sur sa tête ou son corps.
Alternativement, les scientifiques pourraient sélectionner soigneusement les matériaux du robot ainsi que la disposition et la puissance de ses moteurs afin que les collisions produisent spontanément une forme de corps conduisant à un virage.
Ce robot serait doté de ce que les scientifiques appellent une « intelligence mécanique ».
Si les scientifiques comme nous peuvent comprendre comment le corps des organismes réagit mécaniquement au contact avec des objets dans leur environnement, nous pouvons concevoir de meilleurs robots capables de surmonter les obstacles sans avoir à programmer des algorithmes complexes.
Si l’on compare un ensemble diversifié d’organismes ondulants avec le zoo de plus en plus grand des « serpents » robotiques, une différence entre les robots et les ondulateurs biologiques ressort clairement.
Presque tous les robots ondulatoires plient leur corps à l’aide d’une série de segments connectés dotés de moteurs à chaque articulation. Mais ce n’est pas ainsi que les organismes vivants se plient.
En revanche, tous les organismes dépourvus de membres, depuis les grands serpents jusqu’au nématode microscopique, réalisent des courbures non pas à partir d’un seul système articulaire-moteur rotatif, mais plutôt à travers deux bandes de muscles de chaque côté du corps.
Pour un ingénieur, cette conception semble contre-intuitive. Pourquoi contrôler quelque chose avec deux muscles ou moteurs alors qu’un seul peut faire le travail ?
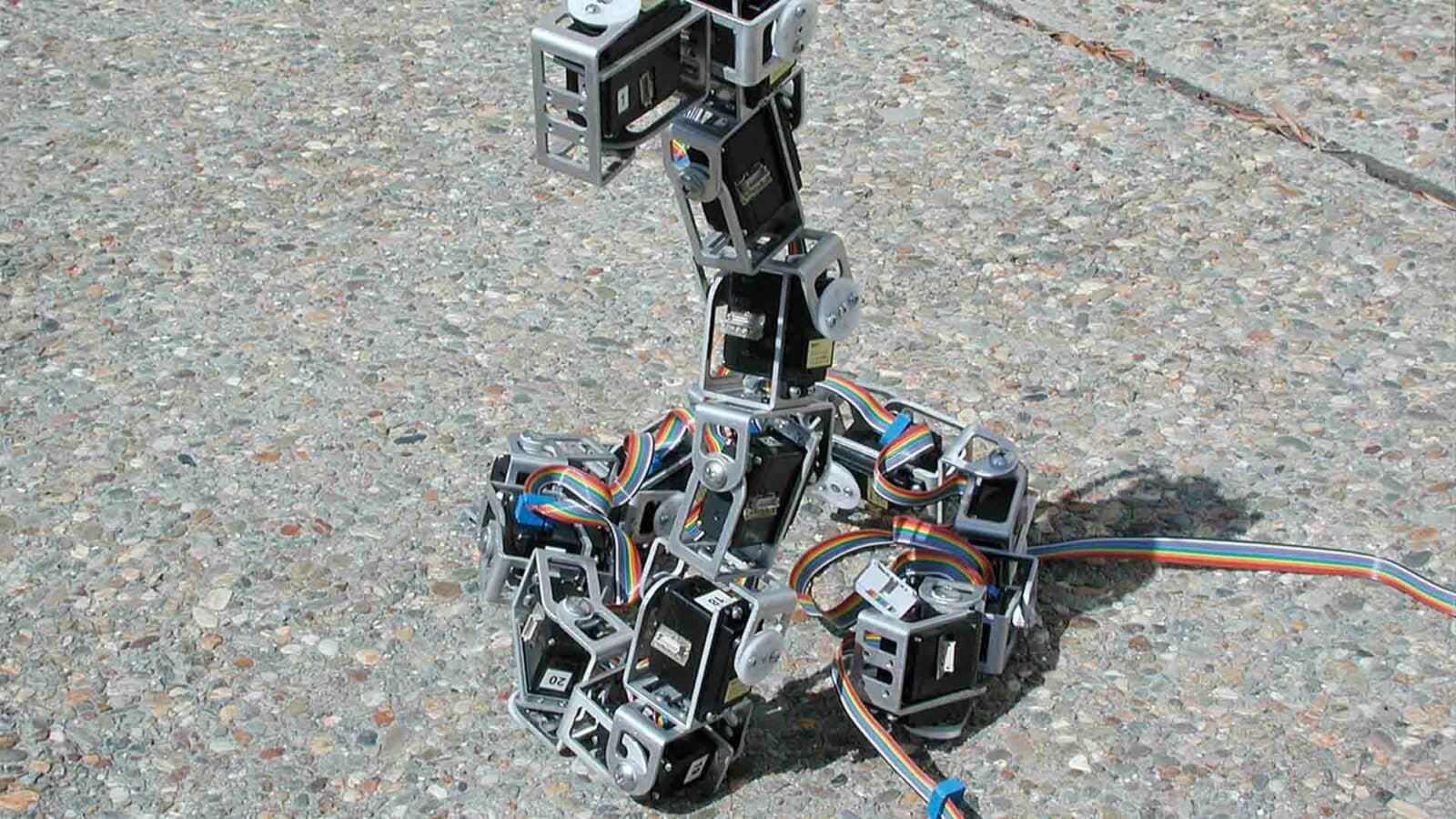
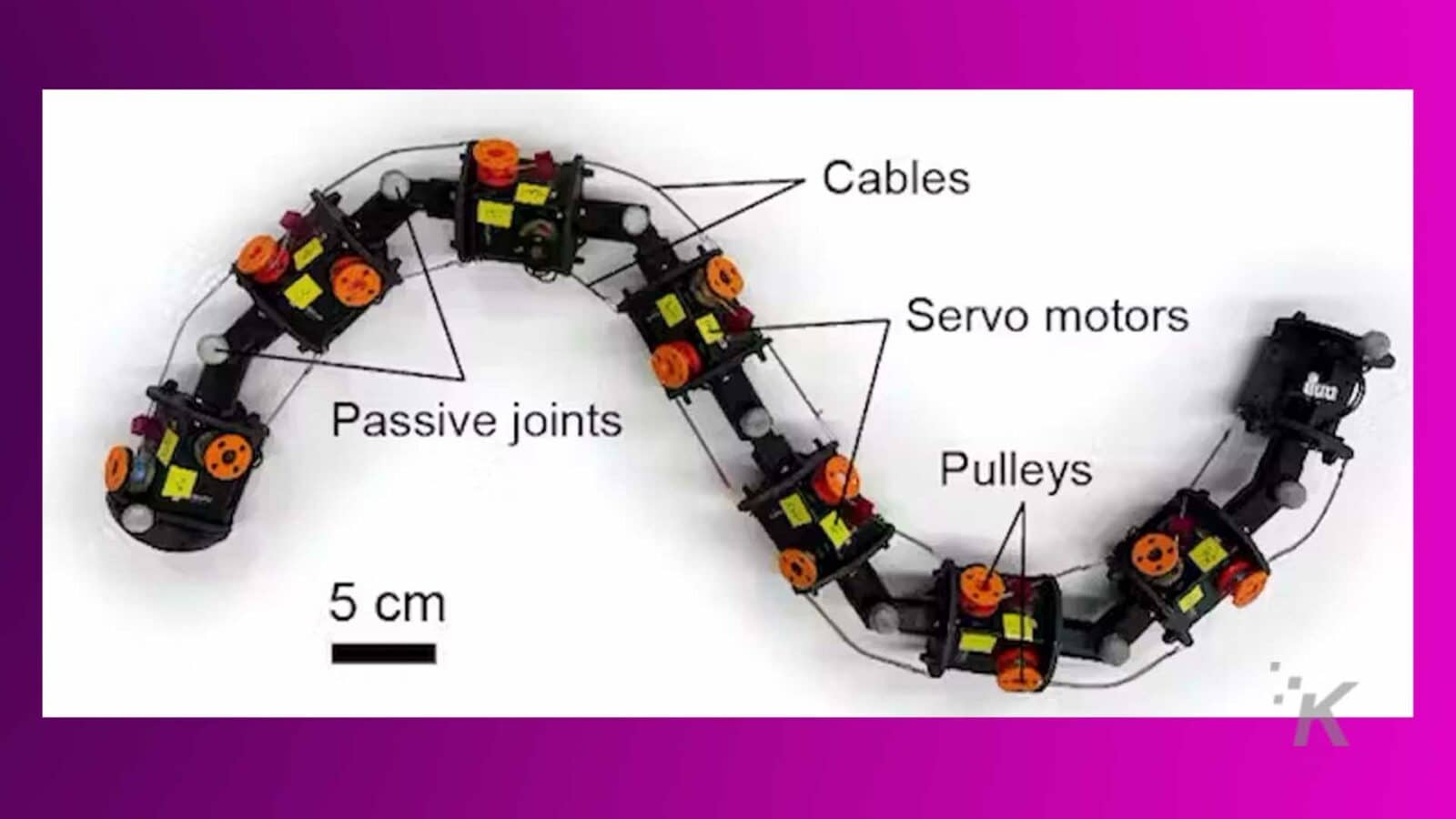
Pour aller au fond de cette question, notre équipe a construit un nouveau robot appelé MILLR, pour robot sans membres mécaniquement intelligent, inspiré des deux bandes musculaires des serpents et des vers.
MILLR dispose de deux câbles contrôlés indépendamment qui tirent chaque articulation vers la gauche et la droite, bilatéralement.
Nous avons constaté que cette méthode permet au robot de se déplacer spontanément autour des obstacles sans avoir à ressentir son environnement et de modifier activement la posture de son corps pour se conformer à l'environnement.
Construire un robot mécaniquement intelligent
Plutôt que d'imiter l'anatomie musculaire détaillée d'un organisme particulier, MILLR applique des forces de chaque côté du corps en enroulant et en déroulant un câble.
De cette façon, il reflète les méthodes d’activation musculaire utilisées par les serpents et les nématodes, où les côtés gauche et droit s’activent à tour de rôle.
Ce mode d'activation tire le corps d'un côté ou de l'autre en se resserrant d'un côté, tandis que l'autre côté se détend et est tiré passivement.
En modifiant le jeu des câbles, nous pouvons obtenir différents degrés de rigidité du corps.
Lorsque le robot entre en collision avec un obstacle, en fonction de la tension du câble, il conserve sélectivement sa forme ou se plie sous la force de l'obstacle.
Nous avons constaté que si le robot se penchait activement d’un côté et qu’il subissait une force dans la même direction, le corps se conformait à la force et se courbait davantage.
Si, à l’inverse, le robot subissait une force opposée au virage, il resterait rigide et se pousserait hors de l’obstacle.
En raison de la configuration de la tension le long du corps, les collisions frontales qui auraient normalement provoqué l'arrêt du mouvement ou le blocage du robot ont naturellement conduit à une redirection autour de l'obstacle.
Le robot pouvait avancer de manière constante.
Test MILLR
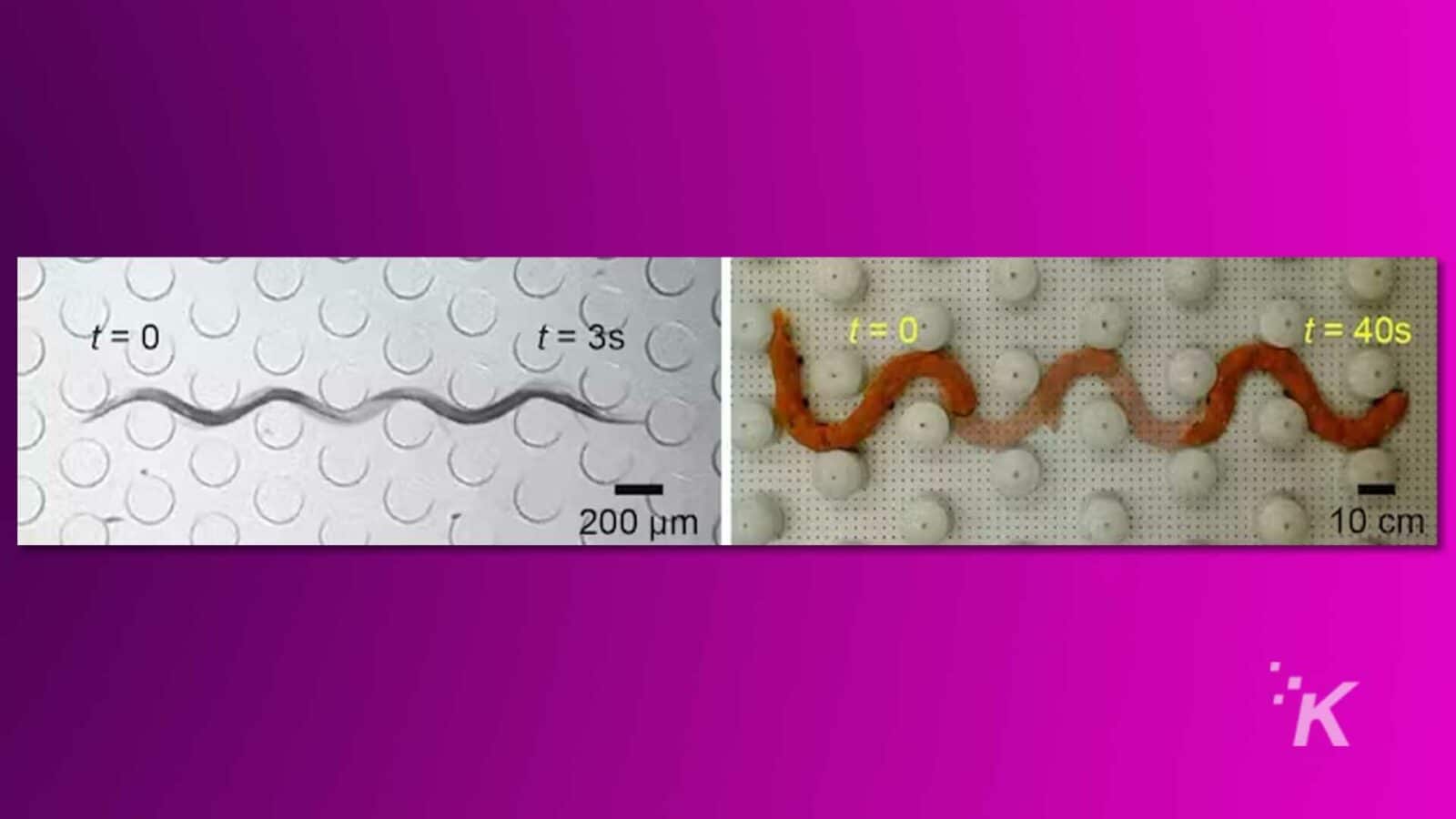
Pour étudier les avantages de l’intelligence mécanique, nous avons construit de minuscules parcours d’obstacles et y avons envoyé des vers nématodes pour voir leurs performances.
Nous avons envoyé MILLR suivre un cours similaire et comparé les résultats. MILLR a parcouru son parcours à peu près aussi efficacement que les vrais vers.
Nous avons remarqué que les vers effectuaient le même type de mouvements corporels lorsqu'ils entraient en collision avec des obstacles, comme le faisait MILLR. Les principes de l’intelligence mécanique pourraient s’étendre au-delà du domaine des nématodes.
Les recherches futures pourraient porter sur la conception de robots basés sur une multitude d’autres types d’organismes pour des applications allant de la recherche et du sauvetage à l’exploration d’autres planètes.
Recommandations des rédacteurs :
- La confidentialité des données, tout comme la parentalité, est un effort collectif
- La survie de ChatGPT en jeu dans le procès du New York Times
- Les humains et ChatGPT reflètent les modèles de langage mutuel – voici comment
- ChatGPT et d'autres IA linguistiques sont tout aussi irrationnelles que nous
Note de l'éditeur : cet article a été rédigé par Tianyu Wang, Ph.D. Étudiant en robotique, Georgia Institute of Technology et Christopher Pierce, chercheur postdoctoral en physique, Georgia Institute of Technology, et republié de The Conversation sous licence Creative Commons. Lisez l' article original e.