
Robot mirip cacing akan segera membantu tim pencarian dan penyelamatan di masa depan
Diterbitkan: 2024-02-25Para ilmuwan telah mencoba membuat robot tanpa kaki dan berbentuk ular selama beberapa dekade. Robot-robot ini dapat berguna dalam situasi pencarian dan penyelamatan, di mana mereka dapat menavigasi bangunan yang runtuh untuk menemukan dan membantu para penyintas.
Dengan tubuh yang ramping dan fleksibel, robot tanpa anggota tubuh dapat dengan mudah bergerak melalui ruang terbatas dan berantakan seperti ladang puing-puing, tempat robot berjalan atau beroda serta penyelamat manusia cenderung gagal.
Namun, bahkan robot tanpa anggota badan yang paling canggih pun belum mampu bergerak dengan kelincahan dan keserbagunaan seperti cacing dan ular di medan yang sulit.
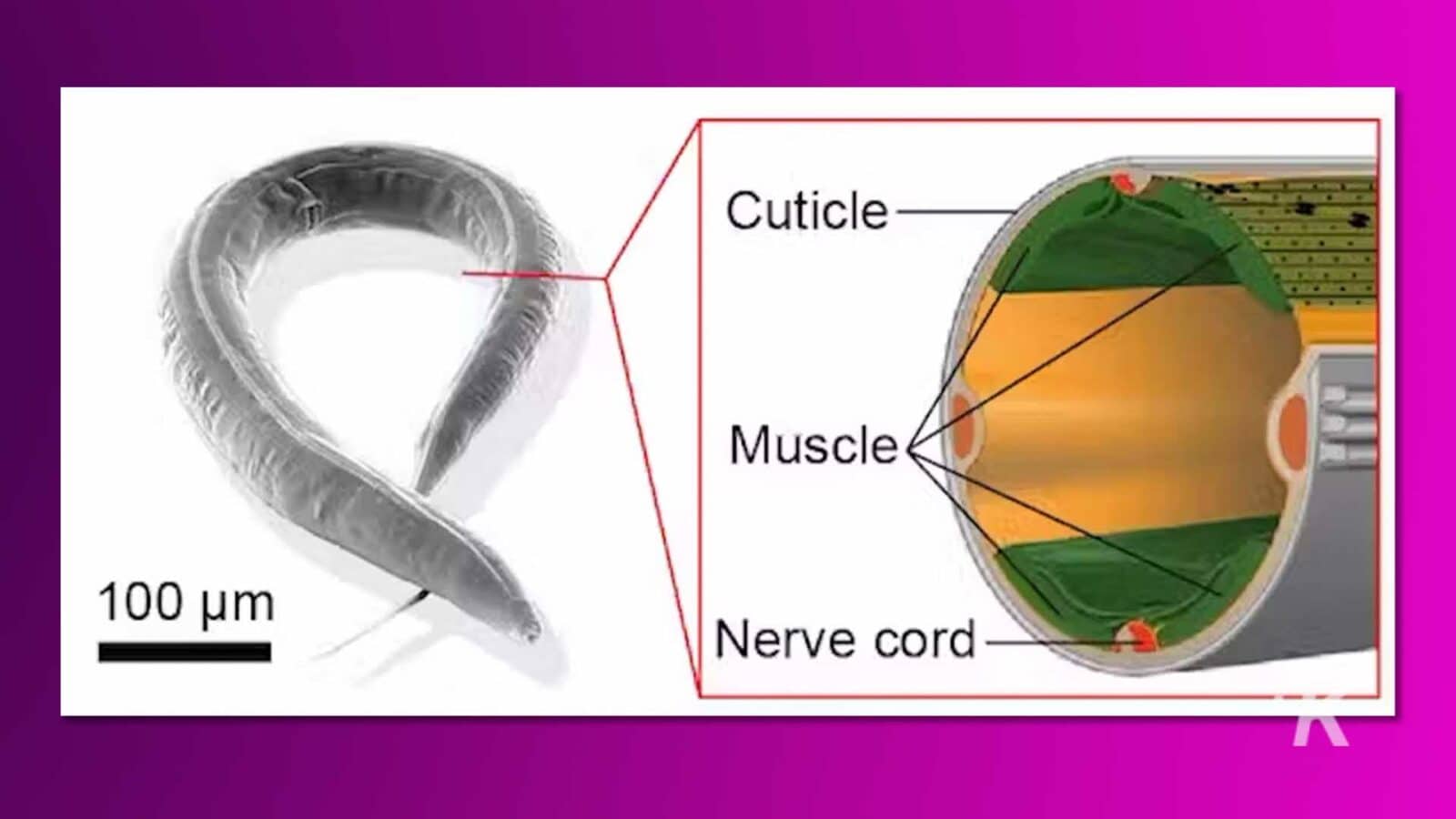
Bahkan cacing nematoda kecil Caenorhabditis elegans , yang memiliki sistem saraf yang relatif sederhana, dapat menavigasi lingkungan fisik yang sulit.
Sebagai bagian dari tim insinyur, ahli robotik, dan fisikawan, kami ingin menyelidiki perbedaan kinerja ini. Namun alih-alih mencari jawaban pada ilmu saraf, kami beralih ke biomekanik.
Kami mulai membuat model robot yang menggerakkan tubuhnya menggunakan mekanisme yang mirip dengan cara cacing dan ular menggerakkan gerakannya.
Undulator dan kecerdasan mekanis
Selama ribuan tahun, organisme telah mengembangkan sistem saraf rumit yang memungkinkan mereka merasakan lingkungan fisiknya, memproses informasi ini, dan melakukan gerakan tubuh yang tepat untuk menavigasi rintangan.
Dalam robotika, para insinyur merancang algoritma yang mengambil informasi dari sensor pada tubuh robot – sejenis sistem saraf robot – dan menggunakan informasi tersebut untuk memutuskan bagaimana cara bergerak. Algoritme dan sistem ini biasanya rumit.
Tim kami ingin mencari cara untuk menyederhanakan sistem ini dengan menyoroti pendekatan yang dikontrol secara mekanis untuk mengatasi hambatan yang tidak memerlukan sensor atau komputasi. Untuk melakukan itu, kami beralih ke contoh dari biologi.
Hewan tidak hanya mengandalkan neuronnya – sel otak dan saraf tepi – untuk mengontrol gerakan.
Mereka juga menggunakan sifat fisik tubuhnya – misalnya elastisitas otot – untuk membantu mereka bereaksi terhadap lingkungan secara spontan, bahkan sebelum neuron mereka sempat merespons.
Meskipun sistem komputasi diatur oleh hukum matematika, sistem mekanis diatur oleh fisika. Untuk mencapai tugas yang sama, para ilmuwan dapat merancang suatu algoritma atau merancang sistem fisik dengan hati-hati.
Misalnya, robot dan hewan tanpa anggota badan bergerak di dunia dengan menekuk bagian tubuhnya ke kiri dan ke kanan, suatu jenis gerakan yang disebut undulasi.
Jika mereka bertabrakan dengan suatu rintangan, mereka harus berbalik dan mengitarinya dengan lebih membungkuk ke satu sisi daripada sisi lainnya. Para ilmuwan dapat mencapai hal ini dengan robot dengan memasang sensor di kepala atau tubuhnya.
Mereka kemudian dapat merancang algoritma yang memberitahu robot untuk berbalik atau memutar rintangan ketika “merasakan” gaya yang cukup besar pada kepala atau tubuhnya.
Sebagai alternatif, para ilmuwan dapat dengan hati-hati memilih bahan robot serta susunan dan kekuatan motornya sehingga tabrakan akan secara spontan menghasilkan bentuk tubuh yang mengarah pada belokan.
Robot ini akan memiliki apa yang oleh para ilmuwan disebut sebagai “kecerdasan mekanis”.
Jika ilmuwan seperti kita dapat memahami bagaimana tubuh organisme merespons secara mekanis terhadap kontak dengan objek di lingkungannya, kita dapat merancang robot yang lebih baik yang dapat menghadapi rintangan tanpa harus memprogram algoritma yang rumit.
Jika Anda membandingkan beragam organisme yang bergelombang dengan kebun binatang robot “ular” yang semakin besar, ada satu perbedaan yang menonjol antara robot dan undulator biologis.
Hampir semua robot bergelombang membengkokkan tubuhnya menggunakan serangkaian segmen yang terhubung dengan motor di setiap sambungannya. Tapi bukan itu cara organisme hidup membengkok.
Sebaliknya, semua organisme tak berkaki, mulai dari ular besar hingga nematoda mikroskopis, memperoleh lengkungan bukan dari satu sistem motorik sendi rotasi, melainkan melalui dua pita otot di kedua sisi tubuh.
Bagi seorang insinyur, desain ini tampak berlawanan dengan intuisi. Mengapa mengendalikan sesuatu dengan dua otot atau motor ketika seseorang bisa melakukan pekerjaan itu?
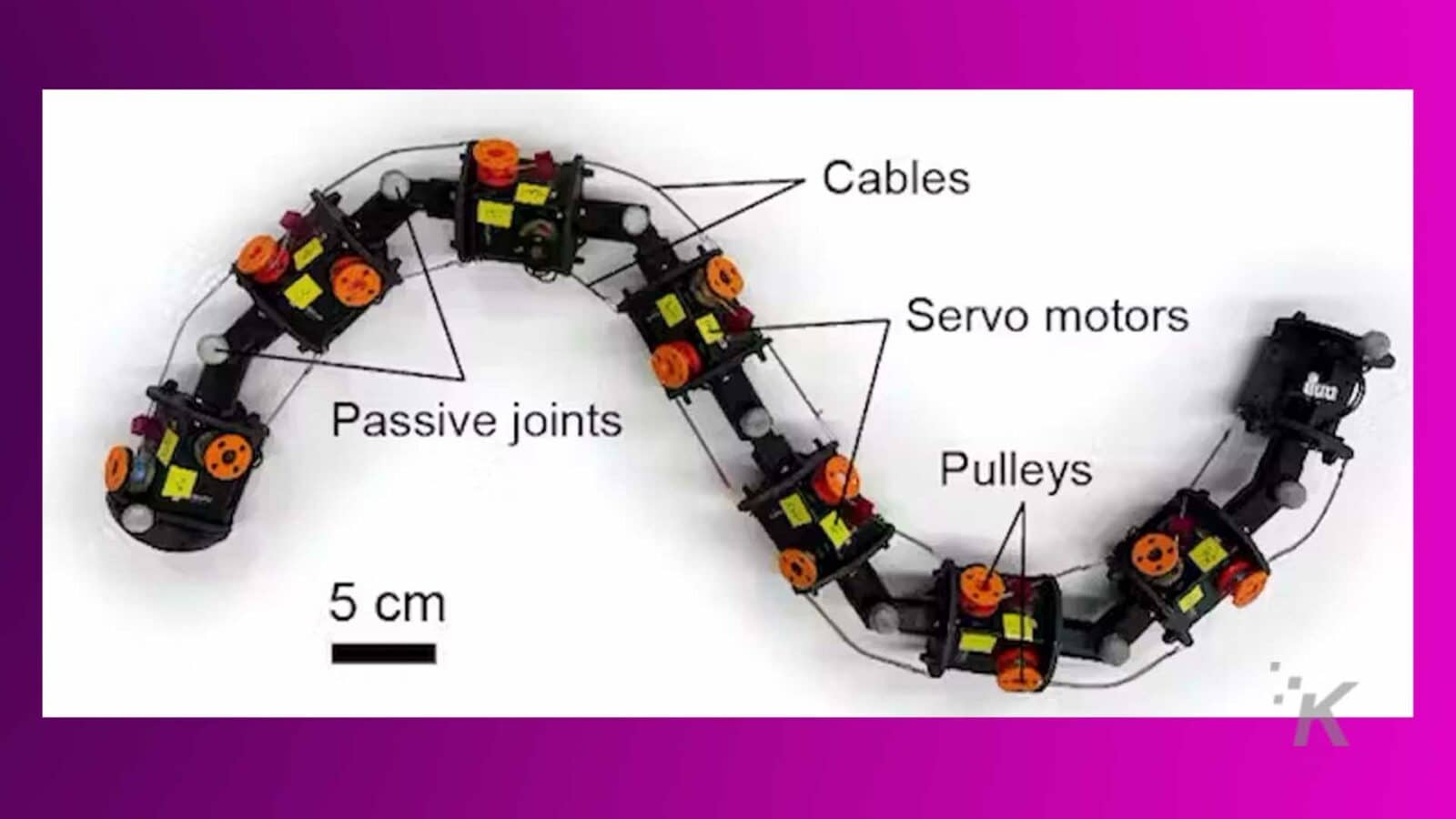
Untuk menjawab pertanyaan ini, tim kami membuat robot baru yang disebut MILLR, untuk robot tanpa anggota badan yang cerdas secara mekanis, yang terinspirasi oleh dua pita otot pada ular dan cacing.
MILLR memiliki dua kabel yang dikontrol secara independen yang menarik setiap sambungan ke kiri dan kanan, secara bilateral.
Kami menemukan metode ini memungkinkan robot untuk bergerak secara spontan di sekitar rintangan tanpa harus merasakan lingkungan sekitarnya dan secara aktif mengubah postur tubuhnya agar sesuai dengan lingkungan.
Membangun robot yang cerdas secara mekanis
Daripada meniru detail anatomi otot organisme tertentu, MILLR menerapkan gaya pada kedua sisi tubuh dengan menggulung dan melepaskan kabel.
Dengan cara ini, ini mencerminkan metode aktivasi otot yang digunakan ular dan nematoda, di mana sisi kiri dan kanan bergiliran mengaktifkannya.
Mode aktivasi ini menarik tubuh ke satu sisi atau sisi lainnya dengan mengencangkan pada satu sisi, sementara sisi lainnya mengendur dan ditarik secara pasif.
Dengan mengubah jumlah kekenduran pada kabel, kita dapat mencapai berbagai tingkat kekakuan tubuh.
Ketika robot bertabrakan dengan rintangan, tergantung pada tegangan kabel, robot secara selektif mempertahankan bentuknya atau membungkuk di bawah kekuatan rintangan.
Kami menemukan bahwa jika robot secara aktif membungkuk ke satu sisi dan mengalami gaya dalam arah yang sama, maka tubuhnya akan mematuhi gaya tersebut dan membungkuk lebih jauh.
Jika, sebagai alternatif, robot mengalami gaya yang melawan tikungan, robot akan tetap kaku dan mendorong dirinya keluar dari rintangan.
Karena pola ketegangan di sepanjang tubuh, tabrakan langsung yang biasanya menyebabkan robot berhenti bergerak atau macet, secara alami menyebabkan pengalihan di sekitar rintangan.
Robot tersebut dapat mendorong dirinya ke depan secara konsisten.
Menguji MILLR
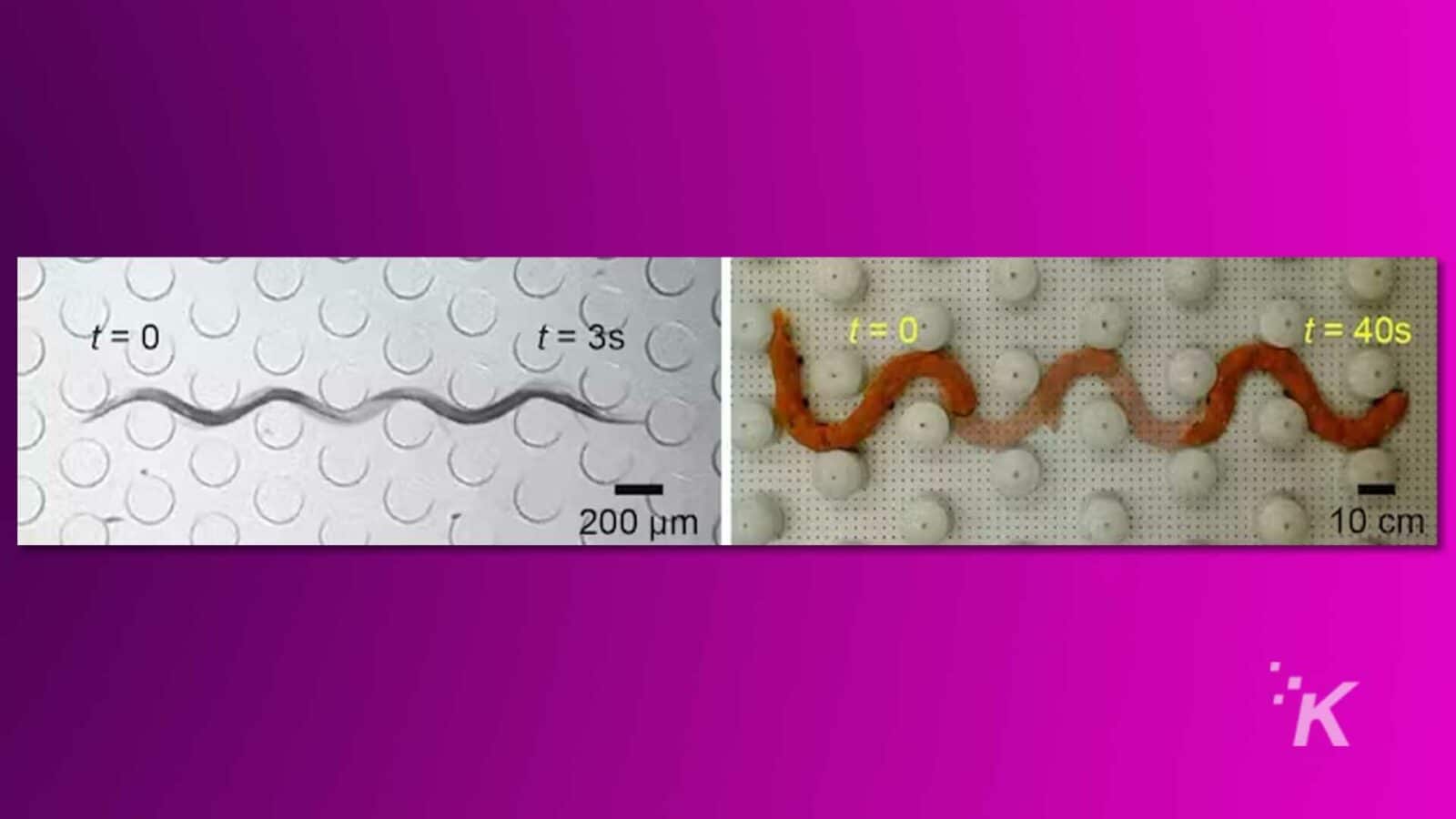
Untuk menyelidiki manfaat kecerdasan mekanis, kami membuat jalur rintangan kecil dan mengirimkan cacing nematoda melewatinya untuk melihat seberapa baik kinerjanya.
Kami mengirimkan MILLR melalui kursus serupa dan membandingkan hasilnya. MILLR bergerak melalui jalurnya seefektif worm yang sebenarnya.
Kami memperhatikan bahwa cacing membuat gerakan tubuh yang sama ketika bertabrakan dengan rintangan seperti yang dilakukan MILLR. Prinsip-prinsip kecerdasan mekanis dapat melampaui bidang nematoda.
Penelitian di masa depan dapat mempertimbangkan perancangan robot berdasarkan sejumlah jenis organisme lain untuk aplikasi mulai dari pencarian dan penyelamatan hingga penjelajahan planet lain.
Rekomendasi Editor:
- Privasi data, seperti halnya mengasuh anak, adalah upaya kolektif
- Kelangsungan hidup ChatGPT dipertaruhkan dalam gugatan New York Times
- Manusia dan ChatGPT mencerminkan pola bahasa yang sama – begini caranya
- ChatGPT dan AI bahasa lain sama tidak rasionalnya dengan kita
Catatan Editor: Artikel ini ditulis oleh Tianyu Wang, Ph.D. Mahasiswa Robotika, Institut Teknologi Georgia dan Christopher Pierce, Sarjana Pascadoktoral Fisika, Institut Teknologi Georgia, dan diterbitkan ulang dari The Conversation di bawah lisensi Creative Commons. Baca artikel aslinya e.