
Robot simili a vermi presto aiuteranno le future squadre di ricerca e salvataggio
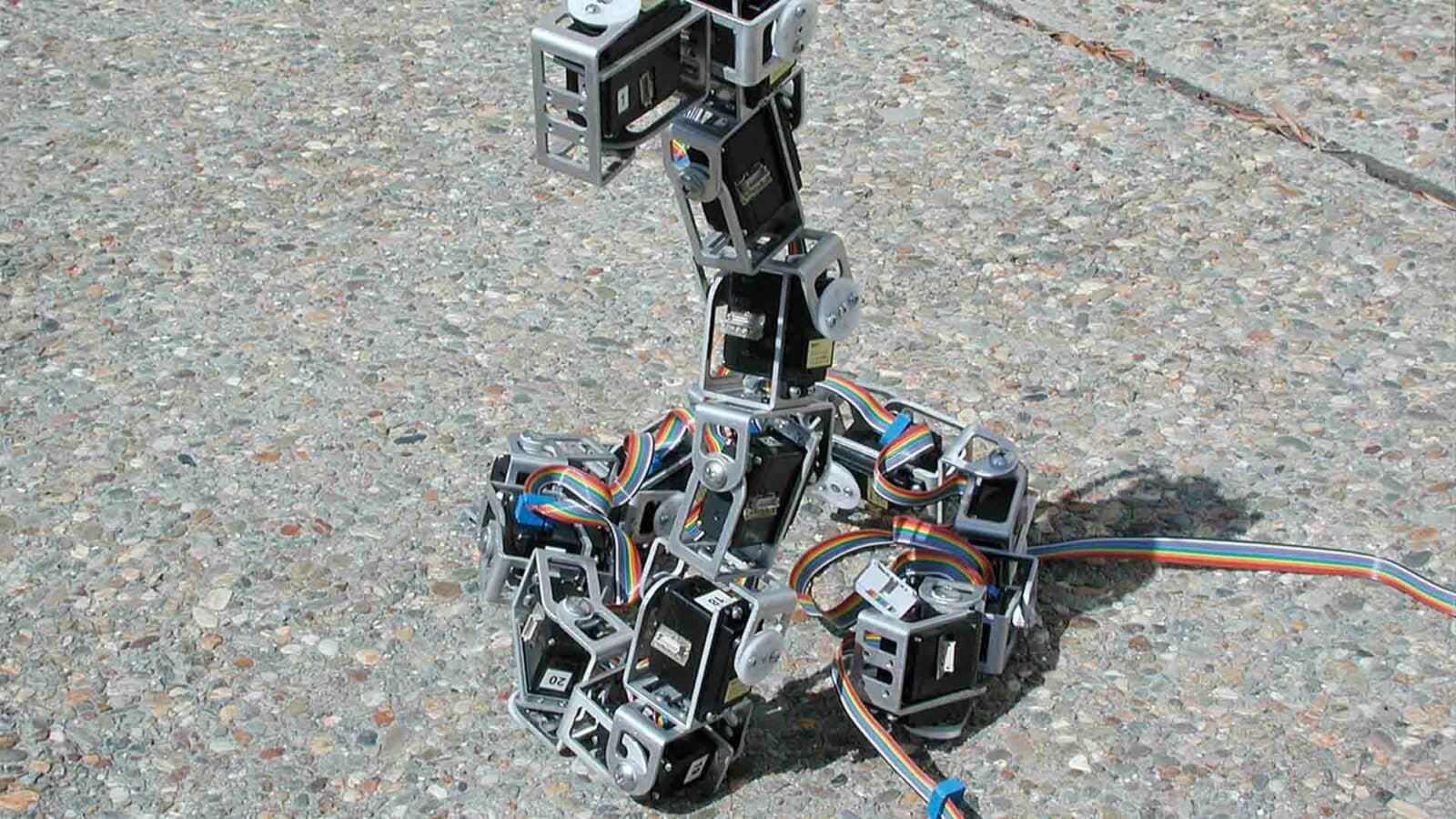
Pubblicato: 2024-02-25Da decenni gli scienziati cercano di costruire robot simili a serpenti e senza arti. Questi robot potrebbero rivelarsi utili in situazioni di ricerca e salvataggio, in cui potrebbero spostarsi negli edifici crollati per trovare e assistere i sopravvissuti.
Con corpi sottili e flessibili, i robot senza arti potrebbero muoversi facilmente attraverso spazi ristretti e disordinati come i campi di detriti, dove i robot che camminano o su ruote e i soccorritori umani tendono a fallire.
Tuttavia, anche i robot senza arti più avanzati non sono riusciti a muoversi con l’agilità e la versatilità di vermi e serpenti su terreni difficili.
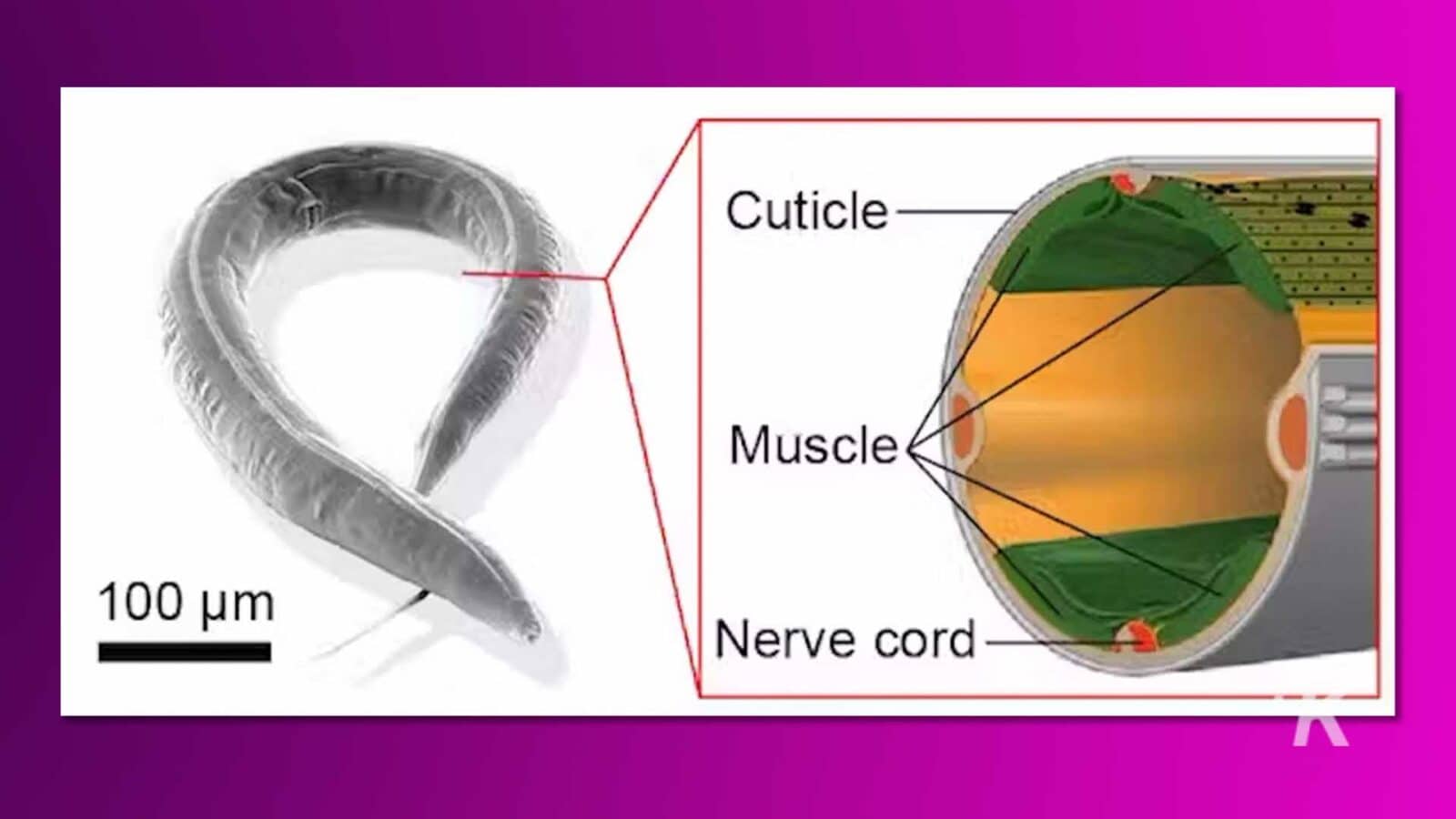
Anche il minuscolo verme nematode Caenorhabditis elegans , che ha un sistema nervoso relativamente semplice, può navigare attraverso ambienti fisici difficili.
Come parte di un team di ingegneri, esperti di robotica e fisici, volevamo esplorare questa discrepanza nelle prestazioni. Ma invece di cercare una risposta nelle neuroscienze, ci siamo rivolti alla biomeccanica.
Abbiamo deciso di costruire un modello di robot che guidasse il suo corpo utilizzando un meccanismo simile a quello con cui vermi e serpenti alimentano il loro movimento.
Ondulatori e intelligenza meccanica
Nel corso di migliaia di anni, gli organismi hanno sviluppato complessi sistemi nervosi che consentono loro di percepire l’ambiente fisico circostante, elaborare queste informazioni ed eseguire movimenti corporei precisi per aggirare gli ostacoli.
Nella robotica, gli ingegneri progettano algoritmi che raccolgono informazioni dai sensori presenti sul corpo del robot – un tipo di sistema nervoso robotico – e utilizzano tali informazioni per decidere come muoversi. Questi algoritmi e sistemi sono generalmente complessi.
Il nostro team voleva trovare un modo per semplificare questi sistemi evidenziando approcci controllati meccanicamente per affrontare gli ostacoli che non richiedono sensori o calcoli. Per fare ciò, ci siamo rivolti ad esempi tratti dalla biologia.
Gli animali non si affidano esclusivamente ai loro neuroni – cellule cerebrali e nervi periferici – per controllare il movimento.
Usano anche le proprietà fisiche del loro corpo – ad esempio l’elasticità dei muscoli – per aiutarli a reagire spontaneamente all’ambiente, prima ancora che i loro neuroni abbiano la possibilità di rispondere.
Mentre i sistemi computazionali sono governati dalle leggi della matematica, i sistemi meccanici sono governati dalla fisica. Per raggiungere lo stesso compito, gli scienziati possono progettare un algoritmo o progettare attentamente un sistema fisico.
Ad esempio, i robot e gli animali senza arti si muovono nel mondo piegando sezioni del loro corpo a destra e a sinistra, un tipo di movimento chiamato ondulazione.
Se si scontrano con un ostacolo, devono voltarsi e aggirarlo piegandosi più da una parte che dall'altra. Gli scienziati potrebbero raggiungere questo obiettivo con un robot collegando sensori alla sua testa o al suo corpo.
Potrebbero quindi progettare un algoritmo che dica al robot di voltarsi o aggirare l’ostacolo quando “sente” una forza sufficientemente grande sulla testa o sul corpo.
In alternativa, gli scienziati potrebbero selezionare attentamente i materiali del robot e la disposizione e la forza dei suoi motori in modo che le collisioni producano spontaneamente una forma del corpo che porti a una svolta.
Questo robot avrebbe quella che gli scienziati chiamano “intelligenza meccanica”.
Se gli scienziati come noi riuscissero a capire come i corpi degli organismi rispondono meccanicamente al contatto con gli oggetti nel loro ambiente, potremmo progettare robot migliori in grado di affrontare gli ostacoli senza dover programmare algoritmi complessi.
Se si confronta un insieme diversificato di organismi ondulatori con il sempre più grande zoo di “serpenti” robotici, emerge una differenza tra i robot e gli ondulatori biologici.
Quasi tutti i robot ondulatori piegano il proprio corpo utilizzando una serie di segmenti collegati con motori su ciascuna articolazione. Ma non è così che si piegano gli organismi viventi.
Al contrario, tutti gli organismi privi di arti, dai grandi serpenti agli umili nematodi microscopici, raggiungono le piegature non da un singolo sistema articolare-motore rotatorio ma piuttosto attraverso due fasce muscolari su entrambi i lati del corpo.
Per un ingegnere, questo progetto sembra controintuitivo. Perché controllare qualcosa con due muscoli o motori quando si potrebbe fare il lavoro?
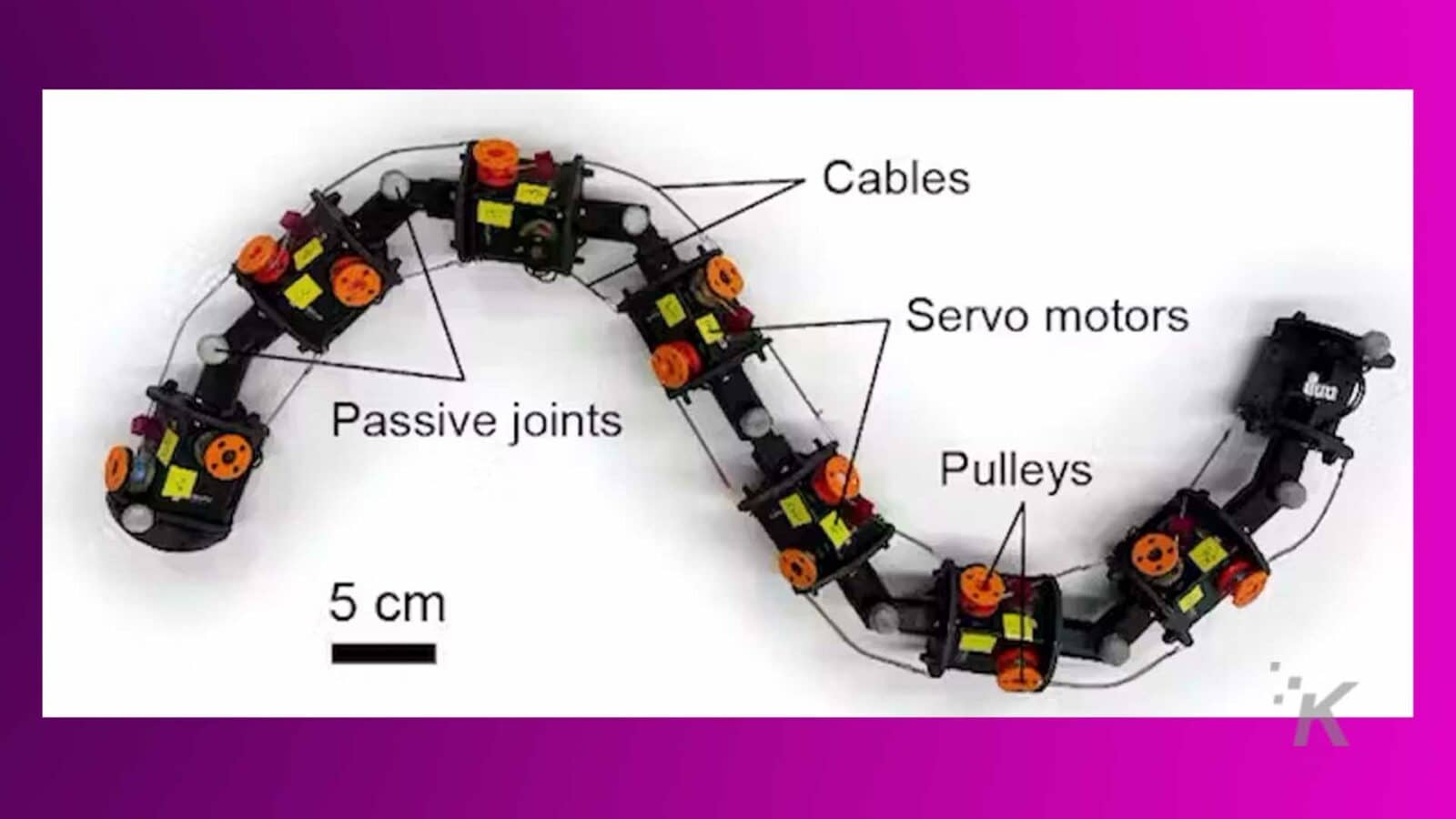
Per andare a fondo di questa domanda, il nostro team ha costruito un nuovo robot chiamato MILLR, ovvero robot senza arti meccanicamente intelligente, ispirato alle due fasce muscolari di serpenti e vermi.
MILLR dispone di due cavi controllati in modo indipendente che tirano ciascuna articolazione a sinistra e a destra, bilateralmente.
Abbiamo scoperto che questo metodo consente al robot di muoversi spontaneamente attorno agli ostacoli senza dover percepire l’ambiente circostante e modificare attivamente la postura del corpo per conformarsi all’ambiente.
Costruire un robot meccanicamente intelligente
Invece di imitare l’anatomia muscolare dettagliata di un particolare organismo, MILLR applica le forze su entrambi i lati del corpo avvolgendo e svolgendo un cavo.
In questo modo, rispecchia i metodi di attivazione muscolare utilizzati dai serpenti e dai nematodi, in cui i lati sinistro e destro si attivano a turno.
Questa modalità di attivazione tira il corpo verso un lato o verso l'altro stringendo un lato, mentre l'altro lato si rilassa e viene tirato passivamente.
Modificando la quantità di allentamento dei cavi, possiamo ottenere vari gradi di rigidità del corpo.
Quando il robot urta un ostacolo, a seconda della tensione del cavo, mantiene selettivamente la sua forma o si piega sotto la forza dell'ostacolo.
Abbiamo scoperto che se il robot si piegava attivamente da un lato e sperimentava una forza nella stessa direzione, il corpo si conformava alla forza e si piegava ulteriormente.
Se, in alternativa, il robot sperimentasse una forza che si oppone alla curvatura, rimarrebbe rigido e si spingerebbe giù dall’ostacolo.
A causa dello schema della tensione lungo il corpo, le collisioni frontali che normalmente causerebbero l'arresto del movimento del robot o l'inceppamento, hanno invece portato naturalmente a un reindirizzamento attorno all'ostacolo.
Il robot potrebbe spingersi in avanti in modo coerente.
Test MILLR
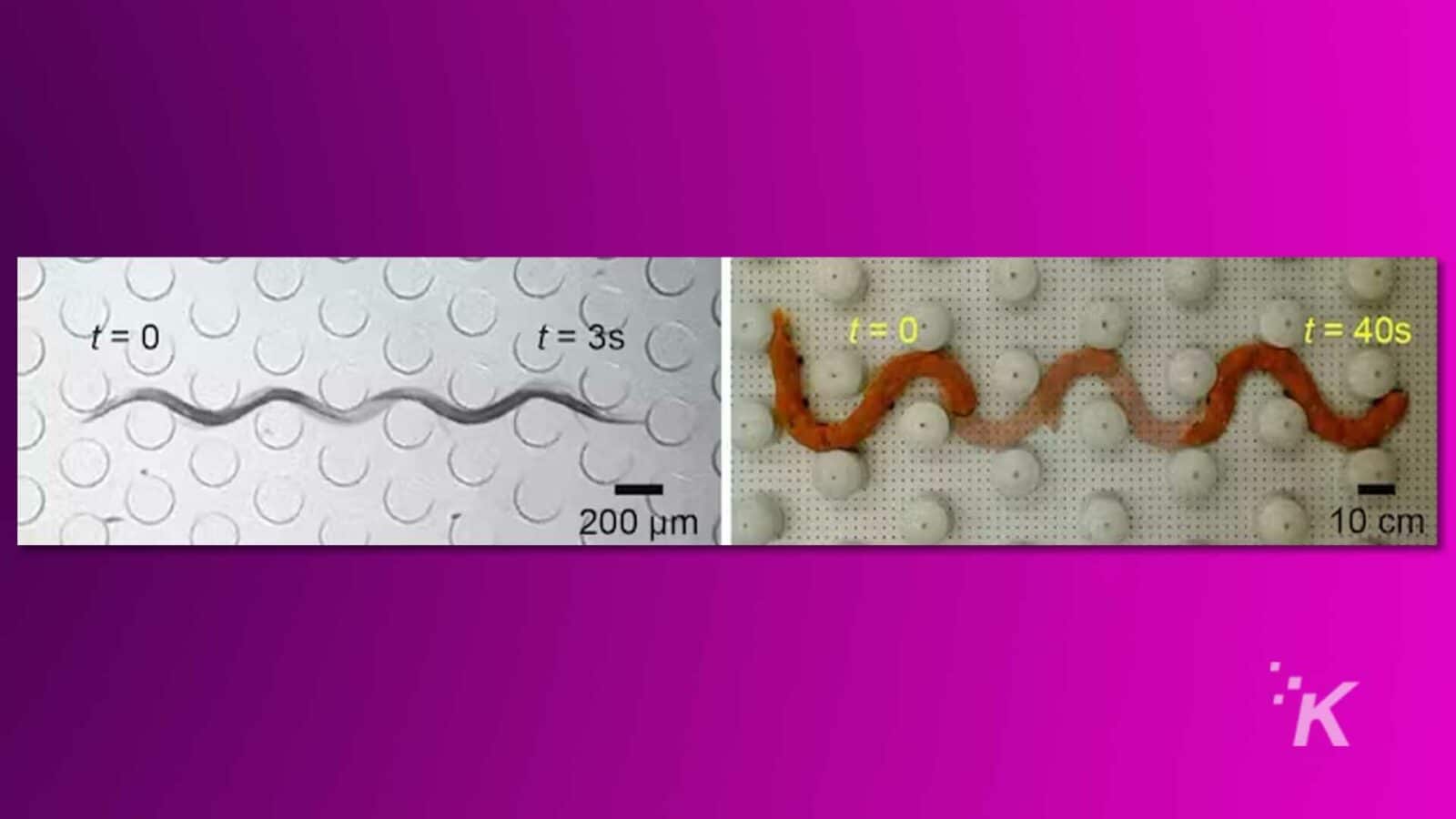
Per studiare i vantaggi dell'intelligenza meccanica, abbiamo costruito minuscoli percorsi a ostacoli e abbiamo inviato vermi nematodi attraverso di essi per vedere quanto si comportavano bene.
Abbiamo inviato MILLR a un corso simile e abbiamo confrontato i risultati. MILLR ha compiuto il suo percorso con la stessa efficacia dei veri vermi.
Abbiamo notato che i vermi eseguivano lo stesso tipo di movimenti del corpo quando entravano in collisione con gli ostacoli come faceva MILLR. I principi dell’intelligenza meccanica potrebbero estendersi oltre il regno dei nematodi.
La ricerca futura potrebbe considerare la progettazione di robot basati su una serie di altri tipi di organismi per applicazioni che vanno dalla ricerca e salvataggio all’esplorazione di altri pianeti.
Raccomandazioni degli editori:
- La privacy dei dati, come la genitorialità, è uno sforzo collettivo
- La sopravvivenza di ChatGPT è in gioco nella causa del New York Times
- Gli esseri umani e ChatGPT rispecchiano modelli linguistici reciproci: ecco come
- ChatGPT e altre IA linguistiche sono irrazionali quanto noi
Nota dell'editore: questo articolo è stato scritto da Tianyu Wang, Ph.D. Studente di robotica, Georgia Institute of Technology e Christopher Pierce, studioso post-dottorato in fisica, Georgia Institute of Technology, e ripubblicato da The Conversation sotto una licenza Creative Commons. Leggi l' articolo originale e.