
Robopodobne roboty wkrótce będą pomagać przyszłym zespołom poszukiwawczo-ratowniczym
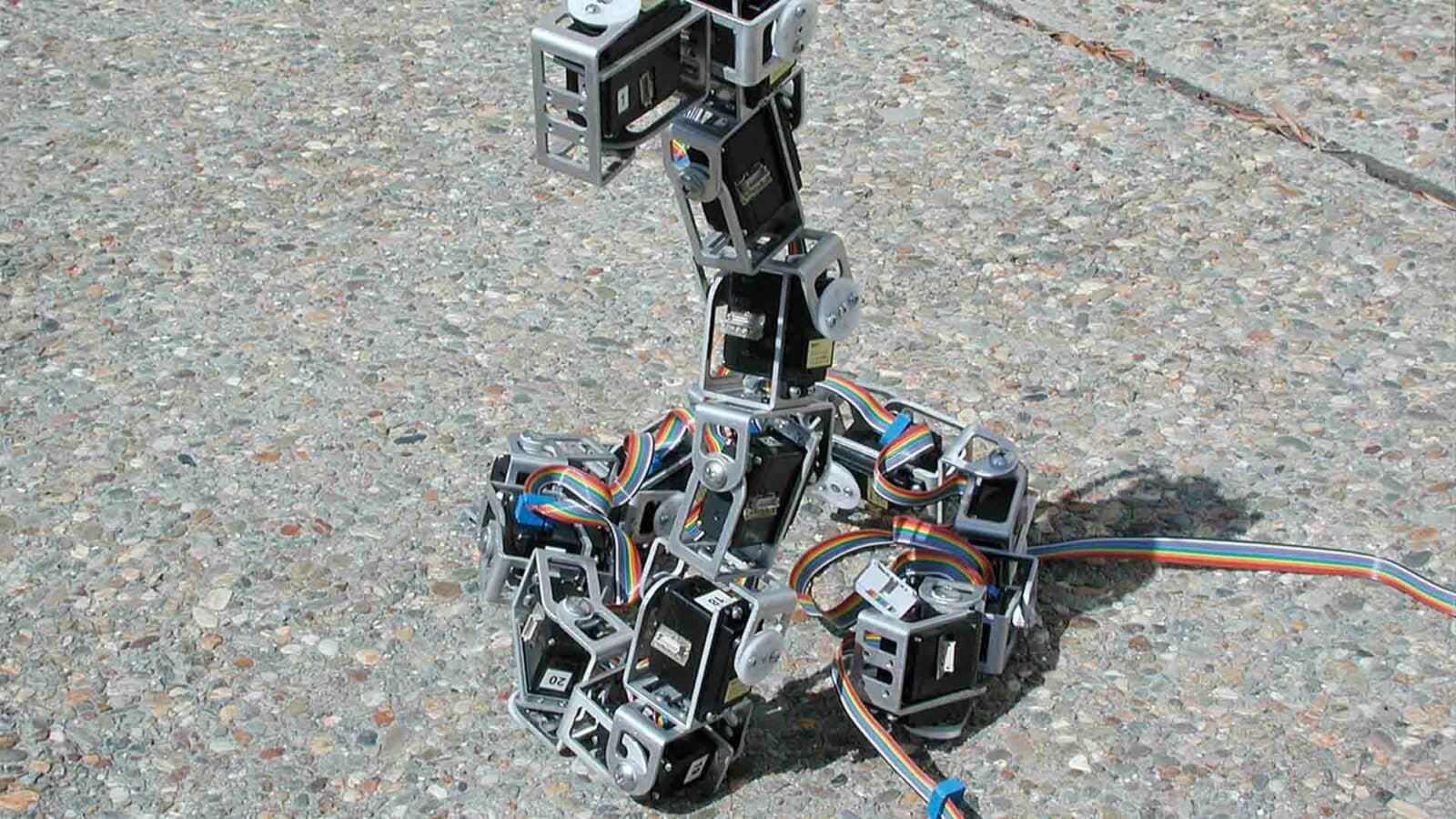
Opublikowany: 2024-02-25Naukowcy od dziesięcioleci próbują zbudować roboty przypominające węże i pozbawione kończyn. Roboty te mogą się przydać w sytuacjach poszukiwawczo-ratowniczych, gdzie mogą poruszać się po zawalonych budynkach, aby znaleźć ocalałych i pomóc im.
Dzięki smukłym, elastycznym ciałom roboty bez kończyn mogą z łatwością poruszać się po ograniczonych i zagraconych przestrzeniach, takich jak pola gruzów, gdzie roboty chodzące lub na kołach oraz ratownicy-ludzie zwykle zawodzą.
Jednak nawet najbardziej zaawansowane roboty bez kończyn nie są w stanie poruszać się w trudnym terenie ze zwinnością i wszechstronnością robaków i węży.
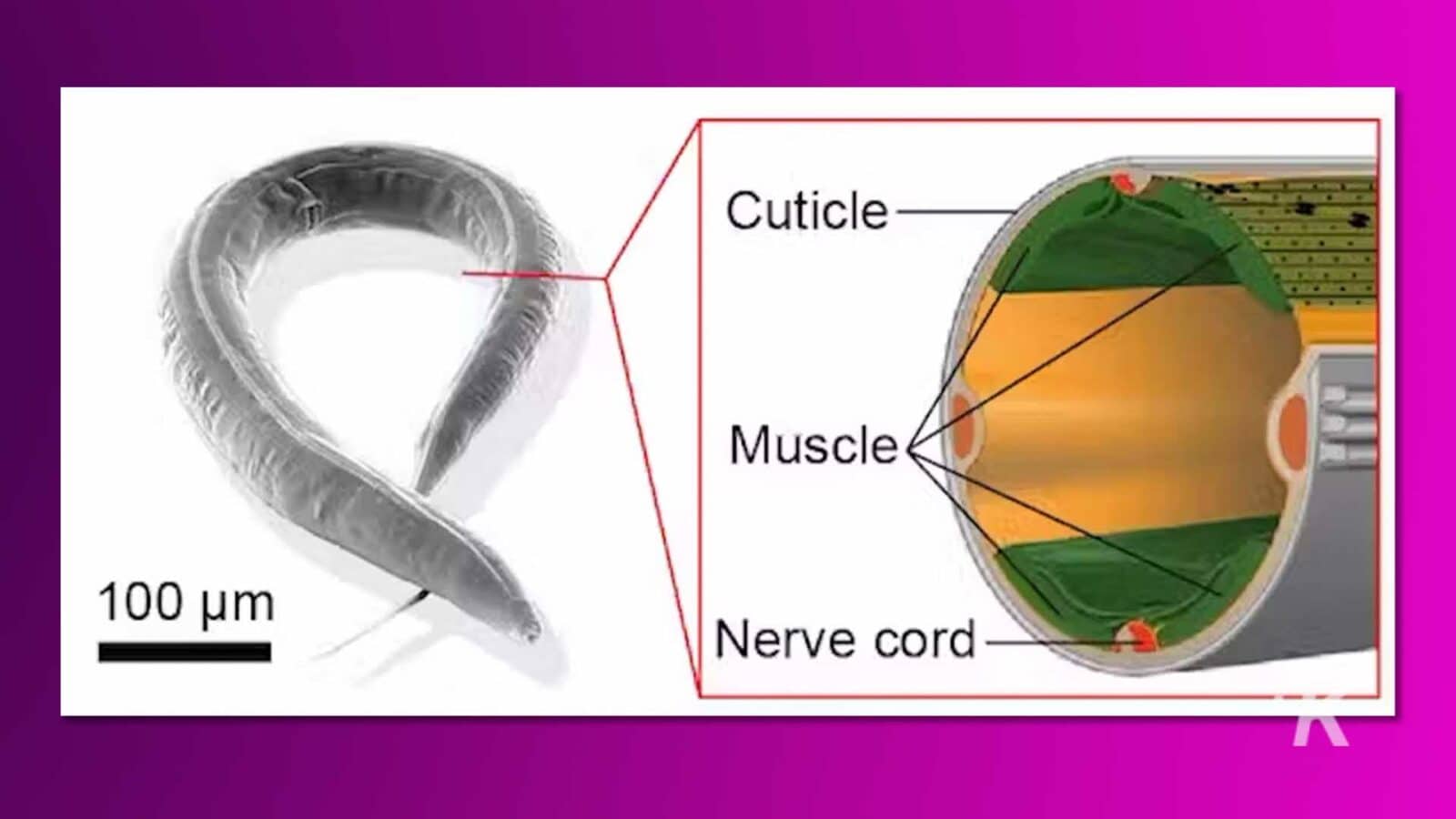
Nawet malutki nicień Caenorhabditis elegans , który ma stosunkowo prosty układ nerwowy, potrafi poruszać się w trudnych warunkach fizycznych.
Jako część zespołu inżynierów, robotyków i fizyków chcieliśmy zbadać tę rozbieżność w wydajności. Zamiast jednak szukać odpowiedzi w neurologii, zwróciliśmy się ku biomechanice.
Postanowiliśmy zbudować model robota, który napędzał swoje ciało za pomocą mechanizmu podobnego do tego, w jaki poruszają się robaki i węże.
Undulatory i inteligencja mechaniczna
Przez tysiące lat organizmy wyewoluowały skomplikowane układy nerwowe, które pozwalają im wyczuwać fizyczne otoczenie, przetwarzać te informacje i wykonywać precyzyjne ruchy ciała w celu omijania przeszkód.
W robotyce inżynierowie projektują algorytmy, które pobierają informacje z czujników znajdujących się na ciele robota – rodzaju robota układu nerwowego – i wykorzystują te informacje do podejmowania decyzji o sposobie poruszania się. Te algorytmy i systemy są zwykle złożone.
Nasz zespół chciał znaleźć sposób na uproszczenie tych systemów, podkreślając mechanicznie kontrolowane podejścia do pokonywania przeszkód, które nie wymagają czujników ani obliczeń. W tym celu odwołaliśmy się do przykładów z biologii.
Zwierzęta nie polegają wyłącznie na swoich neuronach – komórkach mózgowych i nerwach obwodowych – aby kontrolować ruch.
Wykorzystują także właściwości fizyczne swojego ciała – na przykład elastyczność mięśni – aby pomóc im spontanicznie reagować na otoczenie, zanim ich neurony będą miały szansę zareagować.
Podczas gdy systemami obliczeniowymi rządzą prawa matematyki, układami mechanicznymi rządzi fizyka. Aby osiągnąć to samo zadanie, naukowcy mogą albo zaprojektować algorytm, albo dokładnie zaprojektować system fizyczny.
Na przykład pozbawione kończyn roboty i zwierzęta poruszają się po świecie, wyginając części ciała w lewo i prawo, co jest rodzajem ruchu zwanym falowaniem.
Jeśli zderzą się z przeszkodą, muszą zawrócić i ominąć ją, pochylając się bardziej w jedną stronę niż w drugą. Naukowcy mogliby to osiągnąć za pomocą robota, podłączając czujniki do jego głowy lub ciała.
Następnie mogliby zaprojektować algorytm, który każe robotowi odwrócić się lub okrążyć przeszkodę, gdy „wyczuje” wystarczająco dużą siłę działającą na głowę lub ciało.
Alternatywnie naukowcy mogliby starannie dobrać materiały robota oraz rozmieszczenie i wytrzymałość jego silników, tak aby zderzenia spontanicznie powodowały powstanie kształtu ciała prowadzącego do zakrętu.
Robot ten miałby to, co naukowcy nazywają „inteligencją mechaniczną”.
Jeśli naukowcy tacy jak my zrozumieją, w jaki sposób organizmy organizmów reagują mechanicznie na kontakt z obiektami w ich otoczeniu, będziemy mogli zaprojektować lepsze roboty, które poradzą sobie z przeszkodami bez konieczności programowania skomplikowanych algorytmów.
Jeśli porównasz różnorodny zestaw pofałdowanych organizmów z coraz większym zoo robotycznych „węży”, rzuca się w oczy jedna różnica między robotami a biologicznymi undulatorami.
Prawie wszystkie falujące roboty zginają swoje ciała za pomocą szeregu połączonych segmentów z silnikami na każdym przegubie. Ale nie tak wyginają się żywe organizmy.
W przeciwieństwie do tego wszystkie organizmy bez kończyn, od dużych węży po mikroskopijne nicienie, osiągają zakręty nie za pomocą pojedynczego obrotowego układu stawowo-ruchowego, ale poprzez dwa pasma mięśni po obu stronach ciała.
Inżynierowi ten projekt wydaje się sprzeczny z intuicją. Po co kontrolować coś za pomocą dwóch mięśni lub silników, skoro można to zrobić jednym?
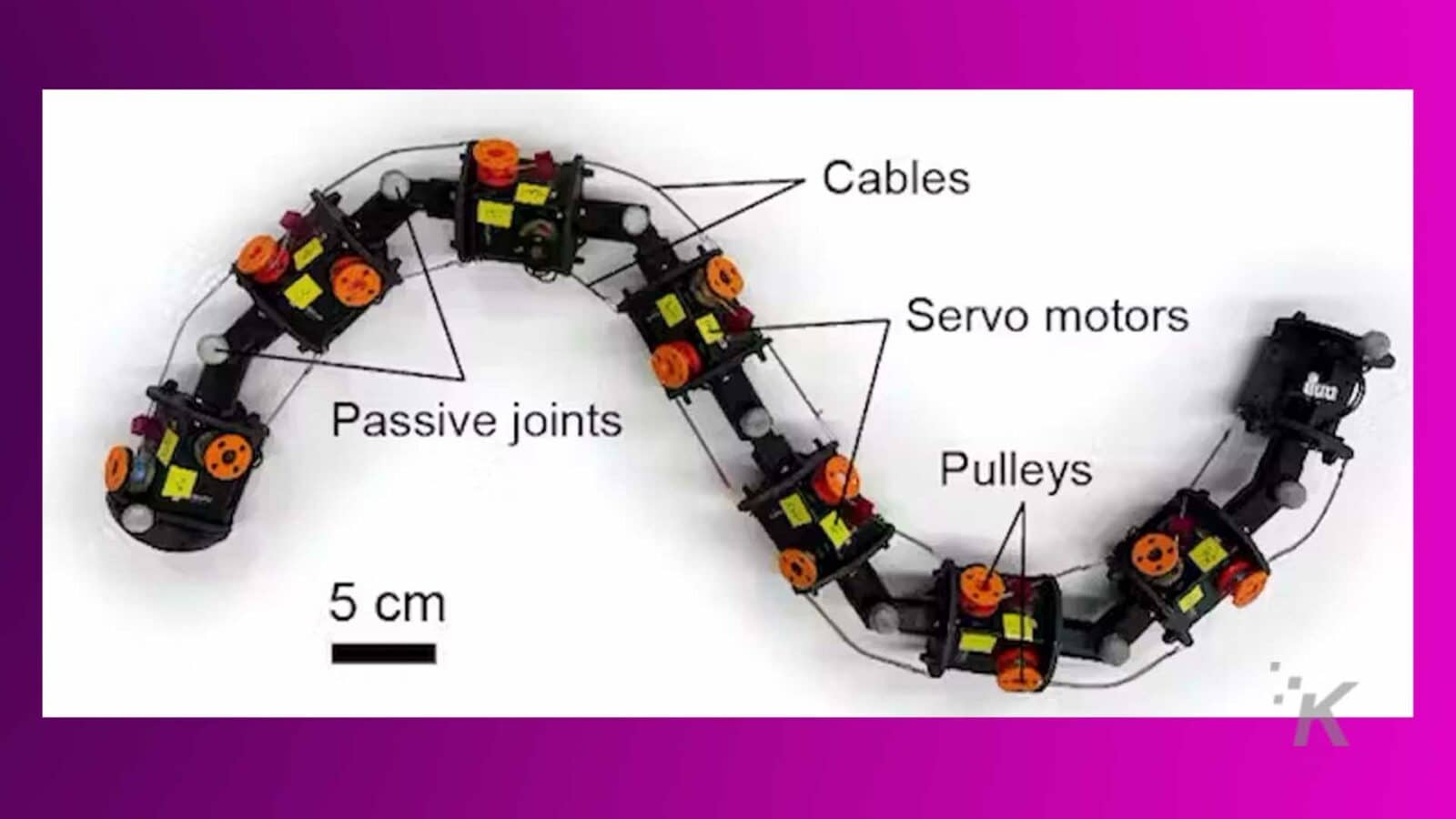
Aby odpowiedzieć na to pytanie, nasz zespół zbudował nowego robota o nazwie MILLR, będącego mechanicznie inteligentnym robotem bez kończyn, inspirowanym dwoma pasmami mięśni węży i robaków.
MILLR posiada dwie niezależnie sterowane linki, które ciągną każde złącze w lewo i w prawo, dwustronnie.
Odkryliśmy, że ta metoda umożliwia robotowi spontaniczne poruszanie się wokół przeszkód bez konieczności wyczuwania otoczenia i aktywnej zmiany postawy ciała, aby dostosować się do otoczenia.
Budowa inteligentnego mechanicznie robota
Zamiast naśladować szczegółową anatomię mięśni konkretnego organizmu, MILLR przykłada siły do obu stron ciała, zwijając i rozwijając kabel.
W ten sposób odzwierciedla metody aktywacji mięśni stosowane przez węże i nicienie, w przypadku których aktywuje się na zmianę lewa i prawa strona.
Ten tryb aktywacji przyciąga ciało w jedną lub drugą stronę poprzez napięcie z jednej strony, podczas gdy druga strona rozluźnia się i jest biernie ciągnięta.
Zmieniając wielkość luzu linek możemy osiągnąć różny stopień sztywności nadwozia.
Robot zderzając się z przeszkodą, w zależności od napięcia liny, selektywnie utrzymuje swój kształt lub ugina się pod naporem przeszkody.
Odkryliśmy, że jeśli robot aktywnie zginał się w jedną stronę i działała na niego siła działająca w tym samym kierunku, ciało poddawało się tej sile i zginało się dalej.
Jeżeli, alternatywnie, na robota działałaby siła przeciwstawiająca się zgięciu, pozostałby sztywny i odepchnąłby się od przeszkody.
Ze względu na układ naprężeń wzdłuż ciała zderzenia czołowe, które w normalnych warunkach powodowałyby zatrzymanie robota lub zablokowanie się, w naturalny sposób prowadziły do przekierowania wokół przeszkody.
Robot mógł konsekwentnie popychać się do przodu.
Testowanie MILLR
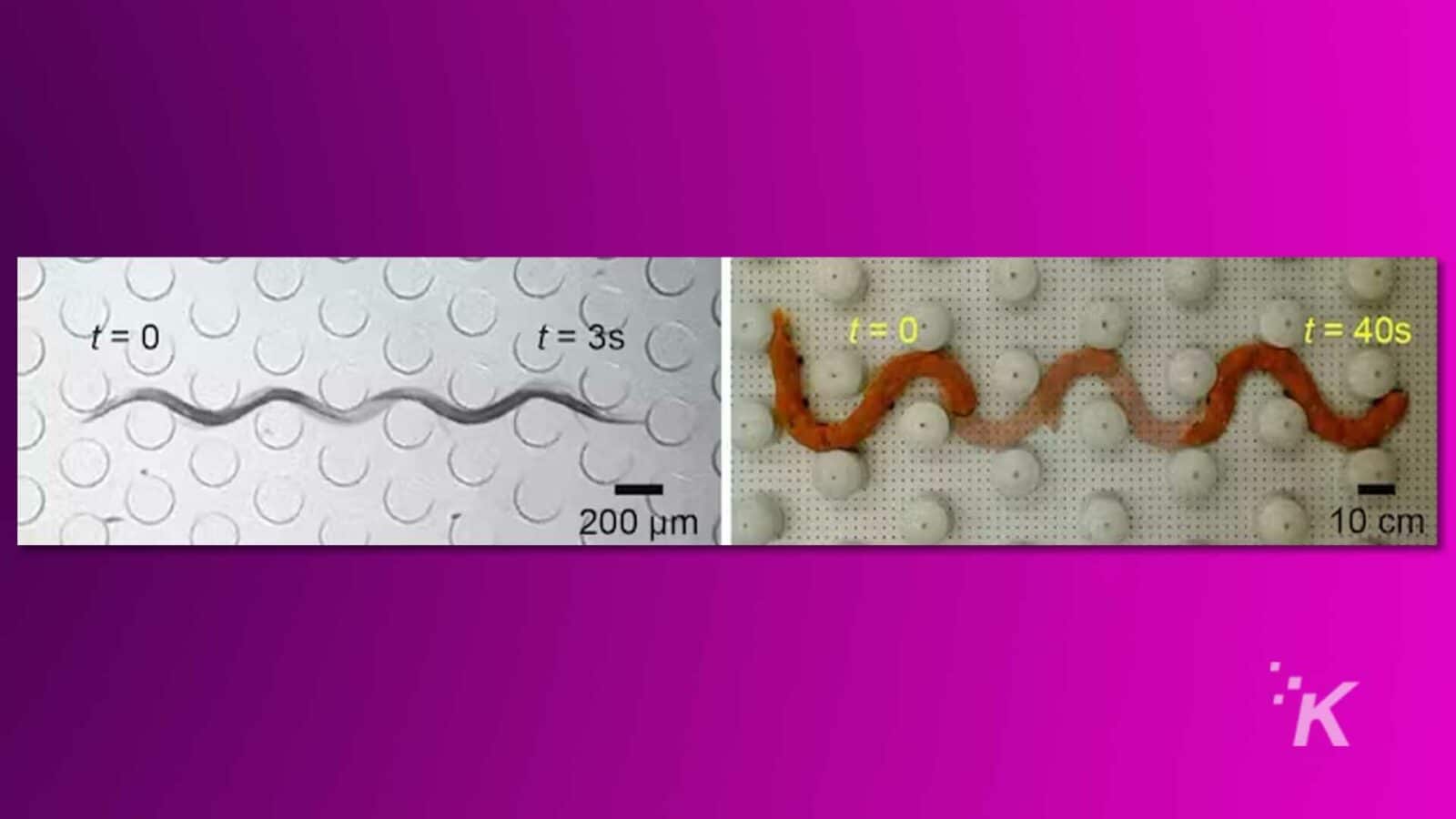
Aby zbadać korzyści płynące z inteligencji mechanicznej, zbudowaliśmy małe tory przeszkód i wysłaliśmy przez nie nicienie, aby sprawdzić, jak dobrze sobie radzą.
Wysłaliśmy MILLR na podobny kurs i porównaliśmy wyniki. MILLR poruszał się po nim mniej więcej tak skutecznie, jak prawdziwe robaki.
Zauważyliśmy, że robaki wykonywały ten sam rodzaj ruchów ciała, gdy zderzały się z przeszkodami, co MILLR. Zasady inteligencji mechanicznej mogą wykraczać poza sferę nicieni.
Przyszłe badania mogą dotyczyć projektowania robotów opartych na wielu innych typach organizmów do zastosowań od poszukiwań i ratownictwa po badanie innych planet.
Zalecenia redaktorów:
- Prywatność danych, podobnie jak rodzicielstwo, to wysiłek zbiorowy
- Stawką w procesie New York Timesa jest przetrwanie ChatGPT
- Humans i ChatGPT odzwierciedlają wspólne wzorce językowe – oto jak to zrobić
- ChatGPT i sztuczna inteligencja innych języków są tak samo irracjonalne jak my
Nota wydawcy: Ten artykuł został napisany przez dr Tianyu Wang. Student robotyki w Georgia Institute of Technology i Christopher Pierce, doktorant z fizyki w Georgia Institute of Technology. Opublikowano ponownie w The Conversation na licencji Creative Commons. Przeczytaj oryginalny artykuł e.