
Robôs semelhantes a vermes em breve ajudarão futuras equipes de busca e resgate
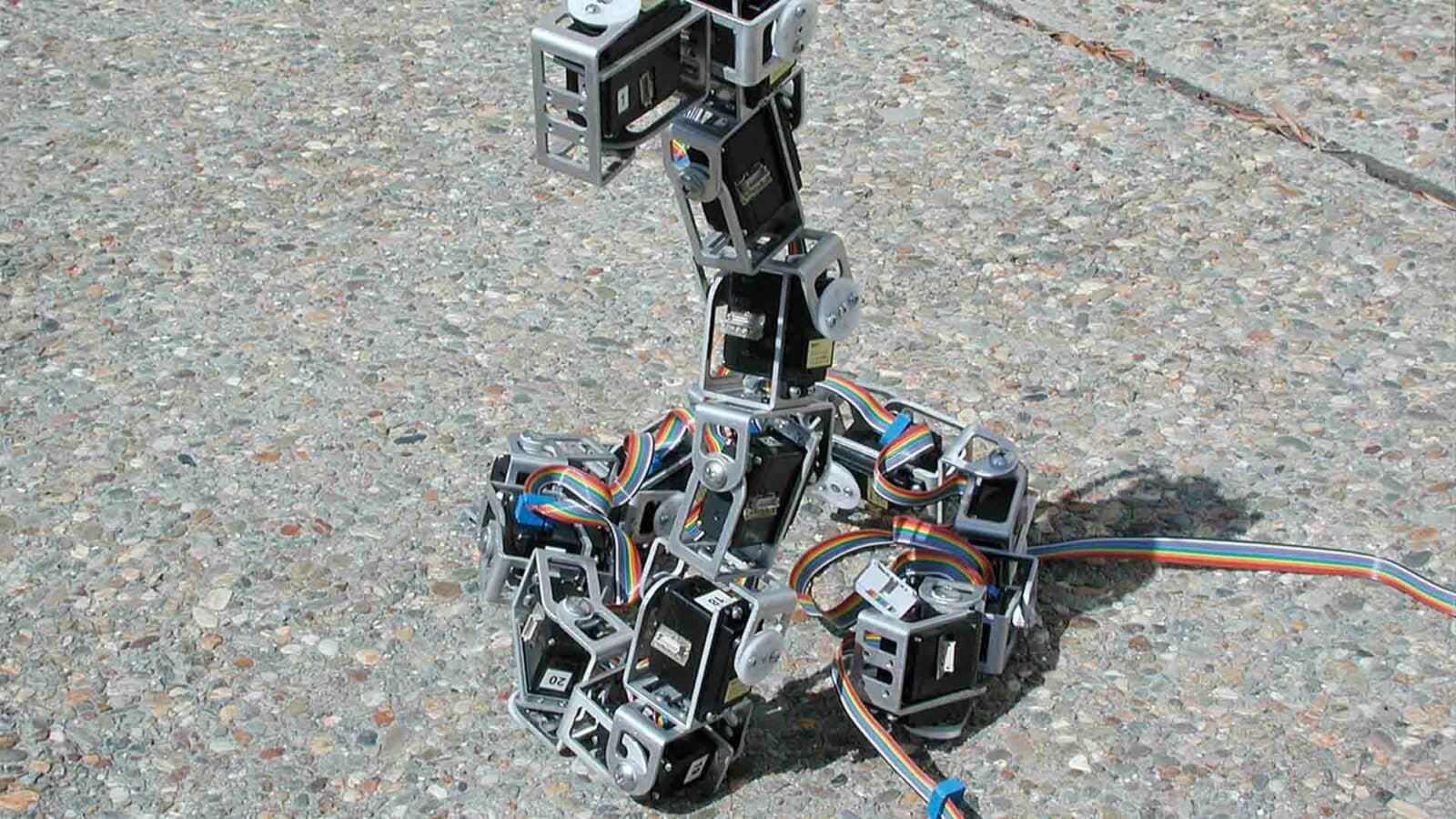
Publicados: 2024-02-25Os cientistas vêm tentando construir robôs sem membros e semelhantes a cobras há décadas. Esses robôs poderiam ser úteis em situações de busca e resgate, onde poderiam navegar em edifícios desabados para encontrar e ajudar sobreviventes.
Com corpos delgados e flexíveis, os robôs sem membros poderiam mover-se facilmente através de espaços confinados e desordenados, como campos de destroços, onde robôs que caminham ou com rodas e socorristas humanos tendem a falhar.
No entanto, mesmo os robôs sem membros mais avançados não chegaram nem perto de se mover com a agilidade e versatilidade de vermes e cobras em terrenos difíceis.
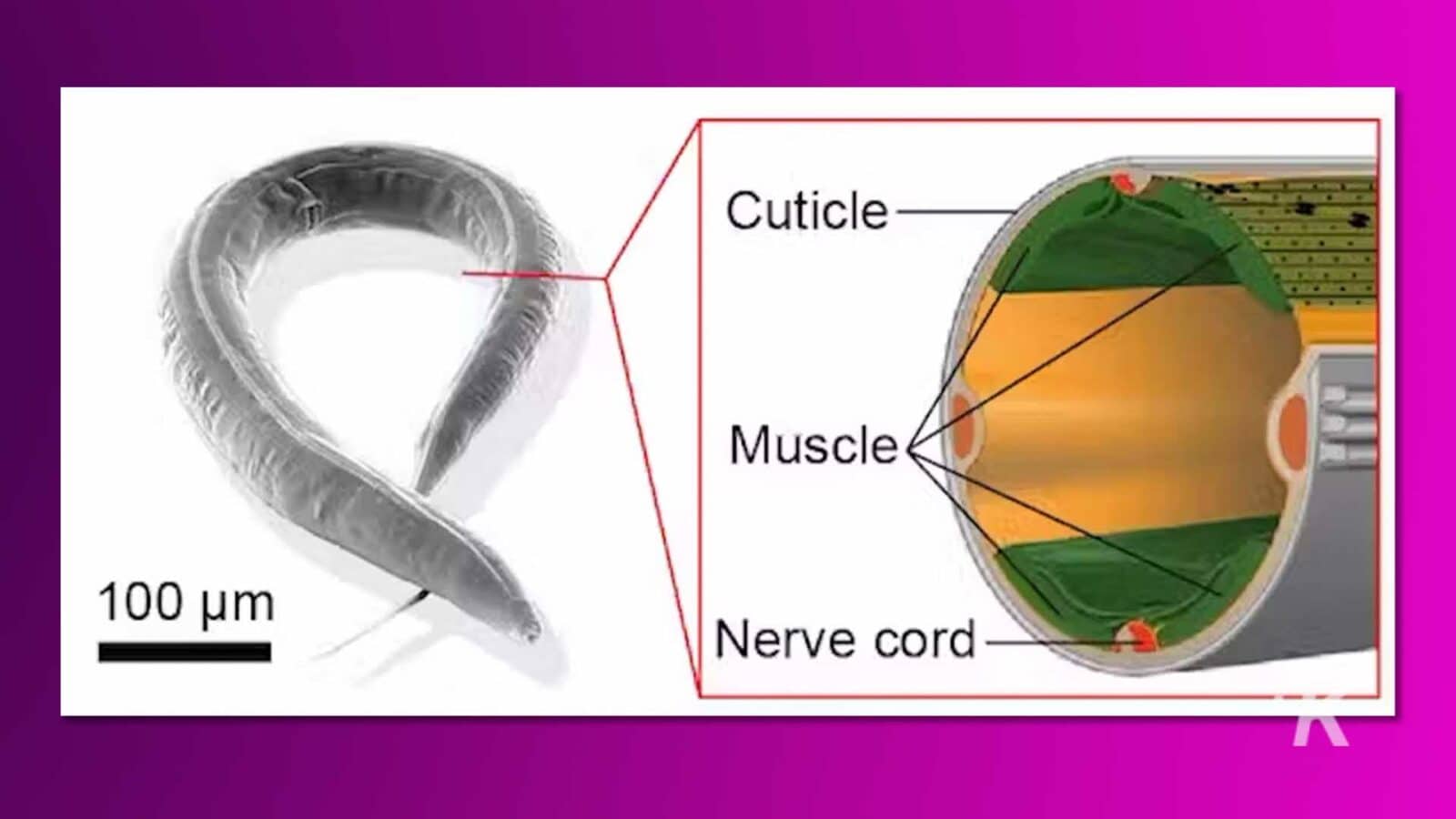
Até mesmo o minúsculo verme nematóide Caenorhabditis elegans , que possui um sistema nervoso relativamente simples, pode navegar por ambientes físicos difíceis.
Como parte de uma equipe de engenheiros, roboticistas e físicos, queríamos explorar essa discrepância de desempenho. Mas, em vez de buscar uma resposta na neurociência, recorremos à biomecânica.
Decidimos construir um modelo de robô que impulsionasse seu corpo usando um mecanismo semelhante ao modo como vermes e cobras impulsionam seus movimentos.
Onduladores e inteligência mecânica
Ao longo de milhares de anos, os organismos desenvolveram sistemas nervosos intrincados que lhes permitem sentir o ambiente físico, processar esta informação e executar movimentos corporais precisos para contornar obstáculos.
Na robótica, os engenheiros projetam algoritmos que captam informações de sensores no corpo do robô – um tipo de sistema nervoso robótico – e usam essas informações para decidir como se mover. Esses algoritmos e sistemas geralmente são complexos.
Nossa equipe queria descobrir uma maneira de simplificar esses sistemas, destacando abordagens controladas mecanicamente para lidar com obstáculos que não exigem sensores ou computação. Para fazer isso, recorremos a exemplos da biologia.
Os animais não dependem apenas dos seus neurónios – células cerebrais e nervos periféricos – para controlar os movimentos.
Eles também usam as propriedades físicas do seu corpo – por exemplo, a elasticidade dos seus músculos – para ajudá-los a reagir espontaneamente ao ambiente, antes mesmo que os seus neurônios tenham a chance de responder.
Enquanto os sistemas computacionais são governados pelas leis da matemática, os sistemas mecânicos são governados pela física. Para realizar a mesma tarefa, os cientistas podem projetar um algoritmo ou projetar cuidadosamente um sistema físico.
Por exemplo, robôs e animais sem membros se movem pelo mundo dobrando seções de seus corpos para a esquerda e para a direita, um tipo de movimento chamado ondulação.
Se colidirem com um obstáculo, terão que se virar e contorná-lo, curvando-se mais para um lado do que para o outro. Os cientistas poderiam conseguir isso com um robô anexando sensores à sua cabeça ou corpo.
Eles poderiam então projetar um algoritmo que diga ao robô para se virar ou contornar o obstáculo quando “sentir” uma força grande o suficiente em sua cabeça ou corpo.
Alternativamente, os cientistas poderiam selecionar cuidadosamente os materiais do robô e a disposição e a força de seus motores, de modo que as colisões produzissem espontaneamente um formato de corpo que levasse a uma curva.
Este robô teria o que os cientistas chamam de “inteligência mecânica”.
Se cientistas como nós conseguirem compreender como os corpos dos organismos respondem mecanicamente ao contacto com objectos no seu ambiente, poderemos conceber robôs melhores que possam lidar com obstáculos sem ter de programar algoritmos complexos.
Se compararmos um conjunto diversificado de organismos ondulantes com o crescente zoológico de “cobras” robóticas, destaca-se uma diferença entre os robôs e os onduladores biológicos.
Quase todos os robôs ondulatórios dobram seus corpos usando uma série de segmentos conectados com motores em cada junta. Mas não é assim que os organismos vivos se curvam.
Em contraste, todos os organismos sem membros, desde grandes cobras até o humilde nematóide microscópico, alcançam curvas não a partir de um único sistema motor articular rotacional, mas através de duas faixas de músculos em cada lado do corpo.
Para um engenheiro, esse projeto parece contra-intuitivo. Por que controlar algo com dois músculos ou motores quando um deles poderia fazer o trabalho?
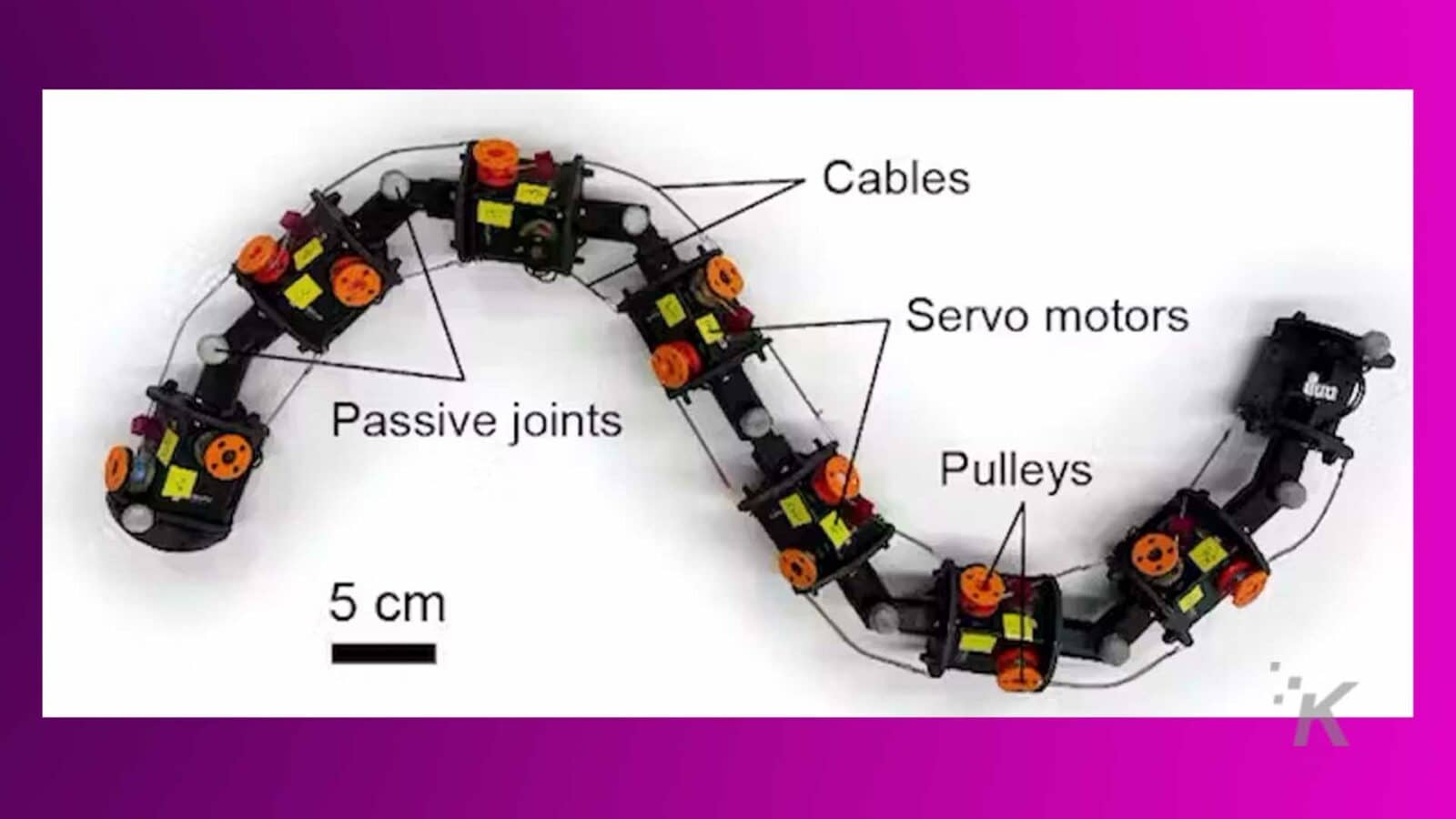
Para chegar ao fundo desta questão, nossa equipe construiu um novo robô chamado MILLR, para robô sem membros mecanicamente inteligente, inspirado nas duas faixas de músculos de cobras e vermes.
O MILLR possui dois cabos controlados independentemente que puxam cada articulação para a esquerda e para a direita, bilateralmente.
Descobrimos que este método permite que o robô se mova espontaneamente em torno de obstáculos sem ter que sentir o ambiente ao seu redor e mudar ativamente sua postura corporal para se adequar ao ambiente.
Construindo um robô mecanicamente inteligente
Em vez de imitar a anatomia muscular detalhada de um organismo específico, o MILLR aplica forças em ambos os lados do corpo, enrolando e desenrolando um cabo.
Dessa forma, ele reflete os métodos de ativação muscular que cobras e nematóides utilizam, onde os lados esquerdo e direito se revezam na ativação.
Este modo de ativação puxa o corpo para um lado ou outro, apertando um lado, enquanto o outro lado relaxa e é puxado passivamente.
Ao alterar a quantidade de folga nos cabos, podemos atingir vários graus de rigidez corporal.
Quando o robô colide com um obstáculo, dependendo da tensão do cabo, ele mantém seletivamente sua forma ou dobra-se sob a força do obstáculo.
Descobrimos que se o robô estivesse se curvando ativamente para um lado e experimentasse uma força na mesma direção, o corpo obedecia à força e se curvava ainda mais.
Se, alternativamente, o robô experimentasse uma força oposta à curvatura, ele permaneceria rígido e se empurraria para fora do obstáculo.
Devido ao padrão de tensão ao longo do corpo, colisões frontais que normalmente fariam com que o robô parasse de se mover ou travasse naturalmente levavam a um redirecionamento em torno do obstáculo.
O robô poderia avançar de forma consistente.
Testando MILLR
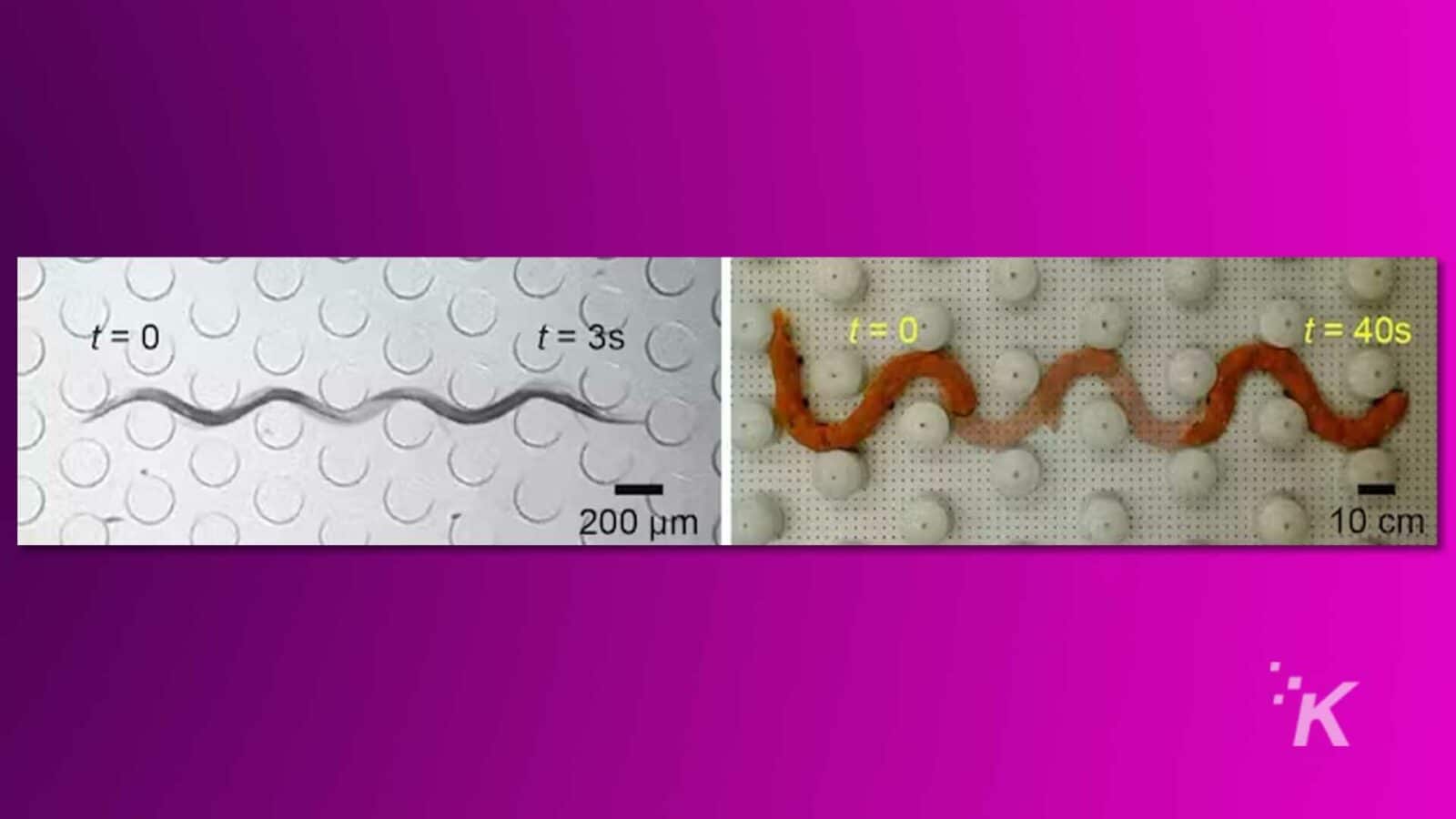
Para investigar os benefícios da inteligência mecânica, construímos pequenas pistas de obstáculos e enviamos vermes nematóides através delas para ver seu desempenho.
Enviamos o MILLR para um curso semelhante e comparamos os resultados. O MILLR percorreu seu curso com a mesma eficácia que os vermes reais.
Percebemos que os vermes faziam o mesmo tipo de movimentos corporais quando colidiam com obstáculos que o MILLR fazia. Os princípios da inteligência mecânica poderiam ir além do domínio dos nematóides.
Pesquisas futuras poderiam considerar o projeto de robôs baseados em uma série de outros tipos de organismos para aplicações que vão desde busca e resgate até a exploração de outros planetas.
Recomendações dos Editores:
- A privacidade dos dados, assim como a paternidade, é um esforço coletivo
- Sobrevivência do ChatGPT em jogo no processo do New York Times
- Humanos e ChatGPT espelham padrões de linguagem mútuos – veja como
- ChatGPT e IA de outras linguagens são tão irracionais quanto nós
Nota do Editor: Este artigo foi escrito por Tianyu Wang, Ph.D. Estudante de Robótica, Instituto de Tecnologia da Geórgia e Christopher Pierce, bolsista de pós-doutorado em Física, Instituto de Tecnologia da Geórgia, e republicado de The Conversation sob uma licença Creative Commons. Leia o artigo original .