
Roboții asemănătoare viermilor vor ajuta în curând viitoarele echipe de căutare și salvare
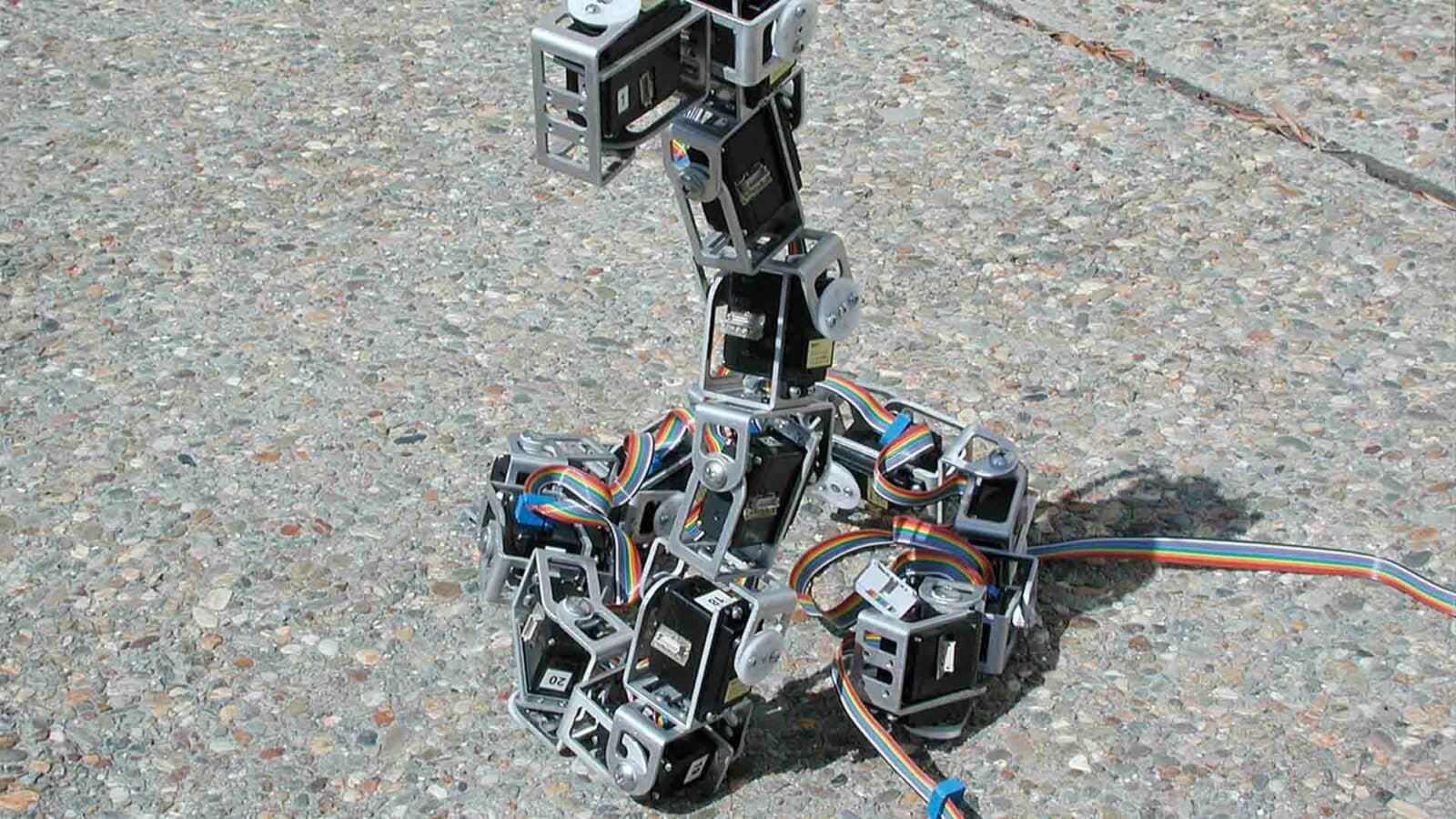
Publicat: 2024-02-25Oamenii de știință au încercat de zeci de ani să construiască roboți asemănătoare șarpelui, fără membre. Acești roboți ar putea fi folositori în situații de căutare și salvare, în care ar putea naviga în clădirile prăbușite pentru a găsi și a ajuta supraviețuitorii.
Cu corpuri zvelte și flexibile, roboții fără membre s-ar putea deplasa cu ușurință prin spații restrânse și aglomerate, cum ar fi câmpurile de moloz, unde roboții care merg sau cu roți și salvatorii umani tind să eșueze.
Cu toate acestea, chiar și cei mai avansați roboți fără membre nu s-au apropiat de a se mișca cu agilitatea și versatilitatea viermilor și șerpilor pe terenuri dificile.
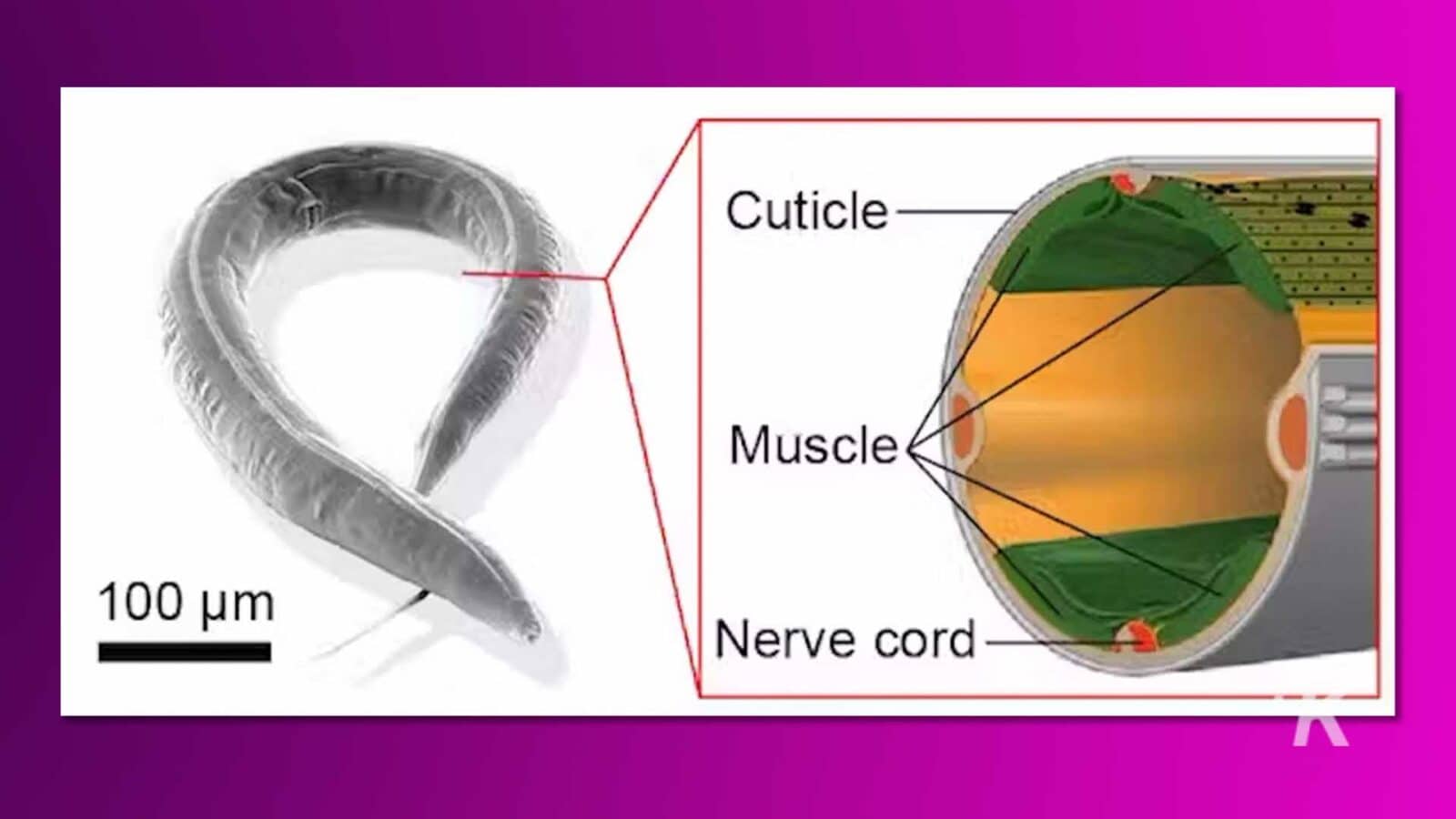
Chiar și micul vierme nematod Caenorhabditis elegans , care are un sistem nervos relativ simplu, poate naviga prin medii fizice dificile.
Ca parte a unei echipe de ingineri, robotiști și fizicieni, am vrut să explorăm această discrepanță în performanță. Dar în loc să căutăm la neuroștiință pentru un răspuns, ne-am orientat către biomecanică.
Ne-am propus să construim un model de robot care să-și conducă corpul folosind un mecanism similar cu modul în care viermii și șerpii își propulsează mișcarea.
Ondulatori și inteligență mecanică
De-a lungul a mii de ani, organismele au evoluat sisteme nervoase complexe care le permit să simtă mediul înconjurător, să proceseze aceste informații și să execute mișcări precise ale corpului pentru a naviga în jurul obstacolelor.
În robotică, inginerii proiectează algoritmi care preiau informații de la senzorii de pe corpul robotului – un tip de sistem nervos robotic – și folosesc aceste informații pentru a decide cum să se miște. Acești algoritmi și sisteme sunt de obicei complexe.
Echipa noastră a vrut să găsească o modalitate de a simplifica aceste sisteme prin evidențierea abordărilor controlate mecanic pentru a face față obstacolelor care nu necesită senzori sau calcul. Pentru a face asta, am apelat la exemple din biologie.
Animalele nu se bazează doar pe neuronii lor - celulele creierului și nervii periferici - pentru a controla mișcarea.
Ei folosesc, de asemenea, proprietățile fizice ale corpului lor - de exemplu, elasticitatea mușchilor lor - pentru a-i ajuta să reacționeze spontan la mediul lor, înainte ca neuronii lor să aibă șansa de a răspunde.
În timp ce sistemele de calcul sunt guvernate de legile matematicii, sistemele mecanice sunt guvernate de fizică. Pentru a realiza aceeași sarcină, oamenii de știință pot fie să proiecteze un algoritm, fie să proiecteze cu atenție un sistem fizic.
De exemplu, roboții și animalele fără membre se deplasează prin lume prin îndoirea secțiunilor corpului lor la stânga și la dreapta, un tip de mișcare numit ondulație.
Dacă se ciocnesc de un obstacol, trebuie să se întoarcă și să-l ocolească aplecându-se mai mult într-o parte decât în cealaltă. Oamenii de știință ar putea realiza acest lucru cu un robot atașând senzori la cap sau la corp.
Ei ar putea apoi să proiecteze un algoritm care să îi spună robotului să se întoarcă sau să ocolească obstacolul atunci când „simte” o forță suficient de mare asupra capului sau corpului său.
Alternativ, oamenii de știință ar putea selecta cu atenție materialele robotului și aranjarea și puterea motoarelor acestuia, astfel încât coliziunile să producă spontan o formă a corpului care a dus la o întoarcere.
Acest robot ar avea ceea ce oamenii de știință numesc „inteligență mecanică”.
Dacă oamenii de știință ca noi pot înțelege modul în care corpurile organismelor răspund mecanic la contactul cu obiectele din mediul lor, putem proiecta roboți mai buni care pot face față obstacolelor fără a fi nevoie să programăm algoritmi complexi.
Dacă compari un set divers de organisme ondulate cu grădina zoologică din ce în ce mai mare de „șerpi” robotici, iese în evidență o diferență între roboți și ondulatorii biologici.
Aproape toți roboții ondulatori își îndoaie corpul folosind o serie de segmente conectate cu motoare la fiecare articulație. Dar nu așa se îndoaie organismele vii.
În contrast, toate organismele fără membre, de la șerpii mari până la nematodul mic, microscopic, realizează îndoiri nu dintr-un singur sistem articular-motor de rotație, ci prin două benzi de mușchi de fiecare parte a corpului.
Pentru un inginer, acest design pare contraintuitiv. De ce să controlezi ceva cu doi mușchi sau motoare când cineva ar putea face treaba?
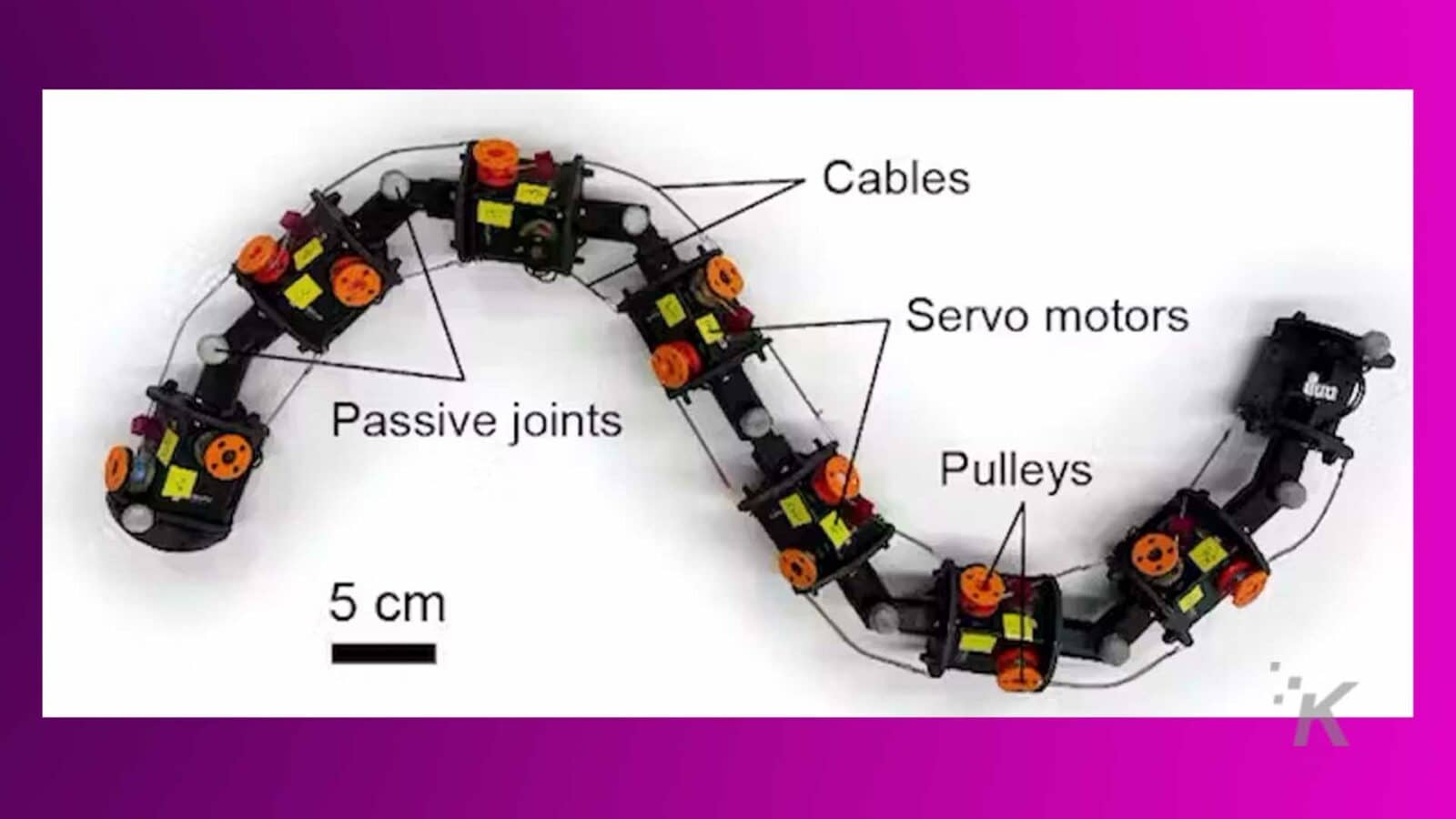
Pentru a ajunge la fundul acestei întrebări, echipa noastră a construit un nou robot numit MILLR, pentru robot fără membre inteligente din punct de vedere mecanic, inspirat de cele două benzi de mușchi de pe șerpi și viermi.
MILLR are două cabluri controlate independent care trag fiecare articulație la stânga și la dreapta, bilateral.
Am descoperit că această metodă permite robotului să se deplaseze spontan în jurul obstacolelor fără a fi nevoit să simtă împrejurimile și să-și schimbe în mod activ postura corpului pentru a se conforma mediului.
Construirea unui robot inteligent mecanic
În loc să mimeze anatomia musculară detaliată a unui anumit organism, MILLR aplică forțe pe ambele părți ale corpului prin derularea și desfășurarea unui cablu.
În acest fel, oglindește metodele de activare musculară pe care le folosesc șerpii și nematozii, unde părțile stânga și dreapta activează pe rând.
Acest mod de activare trage corpul spre o parte sau alta prin strângerea pe o parte, în timp ce cealaltă parte se relaxează și este trasă pasiv.
Schimbând slăbirea cablurilor, putem obține diferite grade de rigiditate a corpului.
Când robotul se ciocnește de un obstacol, în funcție de tensiunea cablului, își menține selectiv forma sau se îndoaie sub forța obstacolului.
Am descoperit că dacă robotul se îndoia activ într-o parte și experimenta o forță în aceeași direcție, corpul respecta forța și se îndoia mai departe.
Dacă, alternativ, robotul ar experimenta o forță care se opune îndoirii, acesta ar rămâne rigid și s-ar împinge de pe obstacol.
Datorită tiparului tensiunii de-a lungul corpului, ciocnirile frontale care ar determina în mod normal robotul să se oprească din mișcare sau să se blocheze au dus în mod natural la o redirecționare în jurul obstacolului.
Robotul s-ar putea împinge înainte constant.
Testarea MILLR
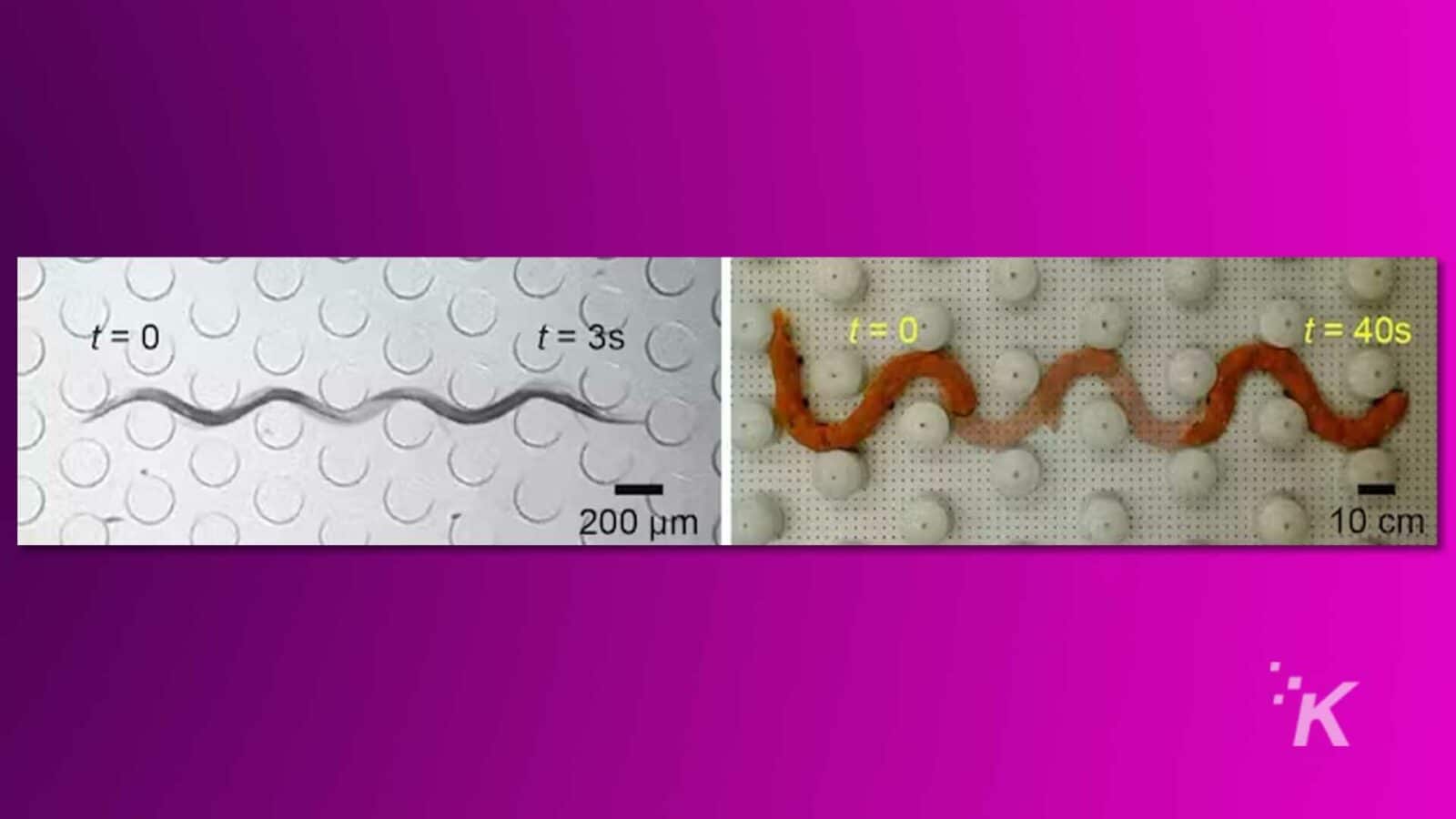
Pentru a investiga beneficiile inteligenței mecanice, am construit curse mici cu obstacole și am trimis viermi nematozi prin ele pentru a vedea cât de bine au funcționat.
Am trimis MILLR printr-un curs similar și am comparat rezultatele. MILLR și-a deplasat cursul la fel de eficient ca viermii adevărați.
Am observat că viermii au făcut același tip de mișcări ale corpului când s-au ciocnit de obstacole ca și MILLR. Principiile inteligenței mecanice s-ar putea extinde dincolo de tărâmul nematozilor.
Cercetările viitoare ar putea viza proiectarea roboților bazați pe o serie de alte tipuri de organisme pentru aplicații, de la căutare și salvare până la explorarea altor planete.
Recomandările editorilor:
- Confidențialitatea datelor, ca și educația parentală, este un efort colectiv
- Supraviețuirea ChatGPT este în joc în procesul New York Times
- Oamenii și ChatGPT oglindesc modele de limbaj reciproce – iată cum
- ChatGPT și alte IA pentru limbi sunt la fel de iraționale ca și noi
Nota editorului: Acest articol a fost scris de Tianyu Wang, Ph.D. Student în Robotică, Georgia Institute of Technology și Christopher Pierce, cercetător postdoctoral în fizică, Georgia Institute of Technology și republicat din The Conversation sub o licență Creative Commons. Citiți articolul original e.