
Червеподобные роботы скоро будут помогать будущим поисково-спасательным командам
Опубликовано: 2024-02-25Ученые десятилетиями пытались создать змееподобных роботов без конечностей. Эти роботы могут пригодиться в поисково-спасательных ситуациях, когда они смогут перемещаться по разрушенным зданиям, чтобы находить выживших и оказывать им помощь.
Обладая тонкими и гибкими телами, роботы без конечностей могут легко перемещаться по замкнутым и захламленным пространствам, таким как поля мусора, где шагающие или колесные роботы и люди-спасатели обычно терпят неудачу.
Однако даже самые продвинутые роботы без конечностей не приблизились к тому, чтобы двигаться с ловкостью и универсальностью червей и змей на труднопроходимой местности.
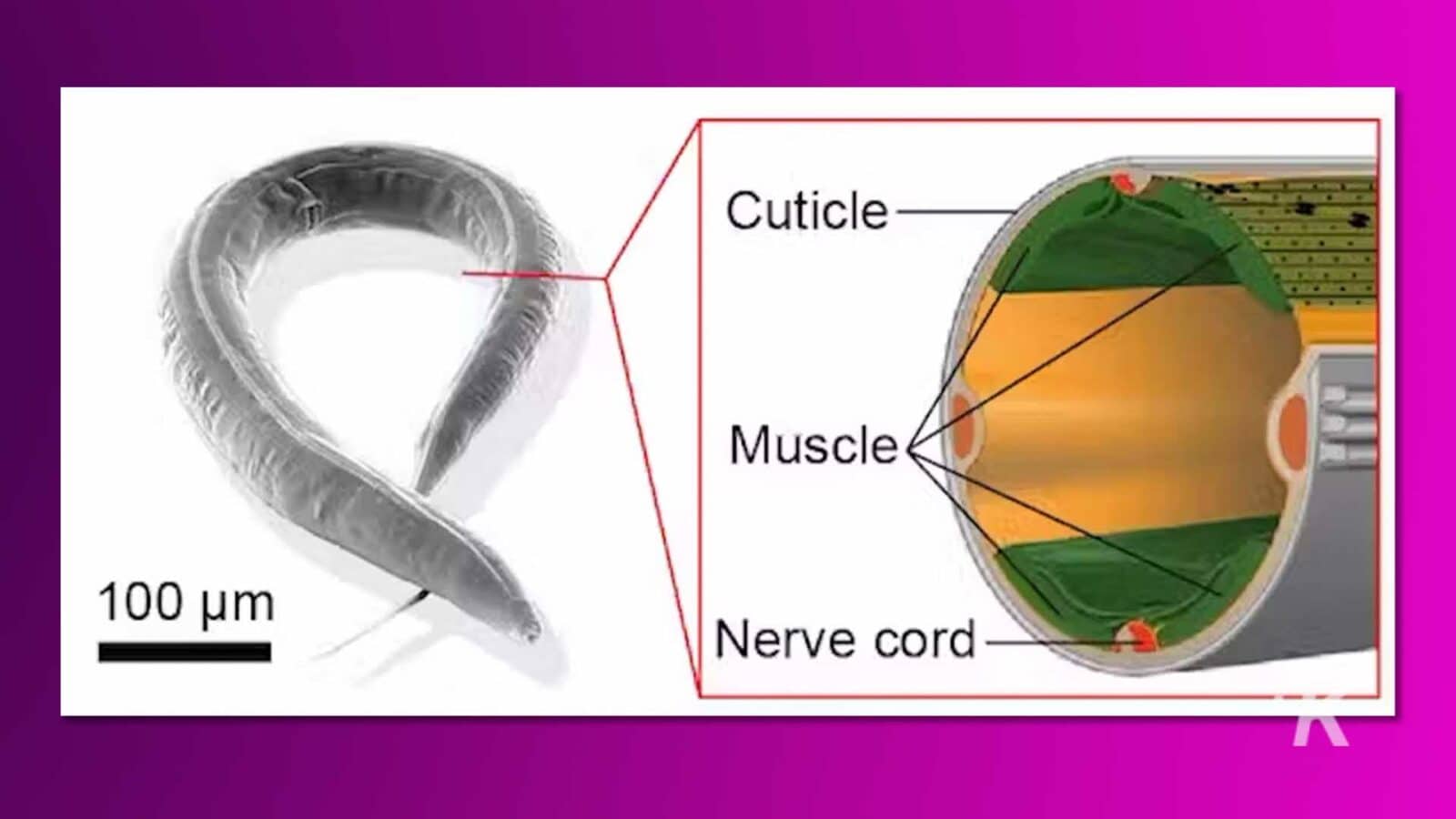
Даже крошечный червь-нематода Caenorhabditis elegans , имеющий относительно простую нервную систему, может ориентироваться в сложных физических условиях.
В составе команды инженеров, робототехников и физиков мы хотели изучить это несоответствие в производительности. Но вместо того, чтобы искать ответ в нейробиологии, мы обратились к биомеханике.
Мы решили создать модель робота, который приводил бы в движение свое тело, используя механизм, аналогичный тому, как черви и змеи управляют своим движением.
Ондуляторы и механический интеллект
За тысячи лет организмы развили сложную нервную систему, которая позволяет им чувствовать физическое окружение, обрабатывать эту информацию и выполнять точные движения тела, чтобы обходить препятствия.
В робототехнике инженеры разрабатывают алгоритмы, которые получают информацию от датчиков на теле робота (типа роботизированной нервной системы) и используют эту информацию, чтобы решить, как двигаться. Эти алгоритмы и системы обычно сложны.
Наша команда хотела найти способ упростить эти системы, выделив механически управляемые подходы к преодолению препятствий, не требующие датчиков или вычислений. Для этого мы обратились к примерам из биологии.
Животные не полагаются исключительно на свои нейроны – клетки головного мозга и периферические нервы – для управления движением.
Они также используют физические свойства своего тела – например, эластичность мышц – чтобы помочь им реагировать на окружающую среду спонтанно, прежде чем их нейроны даже успеют отреагировать.
В то время как вычислительные системы управляются законами математики, механические системы подчиняются законам физики. Для достижения той же задачи ученые могут либо разработать алгоритм, либо тщательно спроектировать физическую систему.
Например, роботы и животные без конечностей перемещаются по миру, сгибая части своего тела влево и вправо — тип движения, называемый волнообразностью.
Если они сталкиваются с препятствием, им приходится отворачиваться и объезжать его, наклоняясь больше в одну сторону, чем в другую. Ученые могли бы добиться этого с помощью робота, прикрепив датчики к его голове или телу.
Затем они могли бы разработать алгоритм, который скажет роботу отвернуться или обогнуть препятствие, когда он «почувствует» достаточно большую силу на своей голове или теле.
В качестве альтернативы ученые могли бы тщательно выбрать материалы робота, а также расположение и мощность его двигателей, чтобы столкновения спонтанно создавали форму тела, приводящую к повороту.
Этот робот будет обладать тем, что ученые называют «механическим интеллектом».
Если такие ученые, как мы, смогут понять, как тела организмов механически реагируют на контакт с объектами в их среде обитания, мы сможем разработать более совершенных роботов, которые смогут преодолевать препятствия без необходимости программировать сложные алгоритмы.
Если вы сравните разнообразный набор волнообразных организмов со все более увеличивающимся зоопарком роботов-змей, вы увидите одно различие между роботами и биологическими ондуляторами.
Почти все волнообразные роботы сгибают свои тела, используя серию соединенных сегментов с двигателями в каждом суставе. Но живые организмы изгибаются не так.
Напротив, все организмы, лишенные конечностей, от крупных змей до скромных микроскопических нематод, достигают изгибов не за счет одной вращательной суставно-двигательной системы, а за счет двух групп мышц по обе стороны тела.
Инженеру такая конструкция кажется нелогичной. Зачем управлять чем-то с помощью двух мышц или моторов, если эту работу можно выполнить одним человеком?
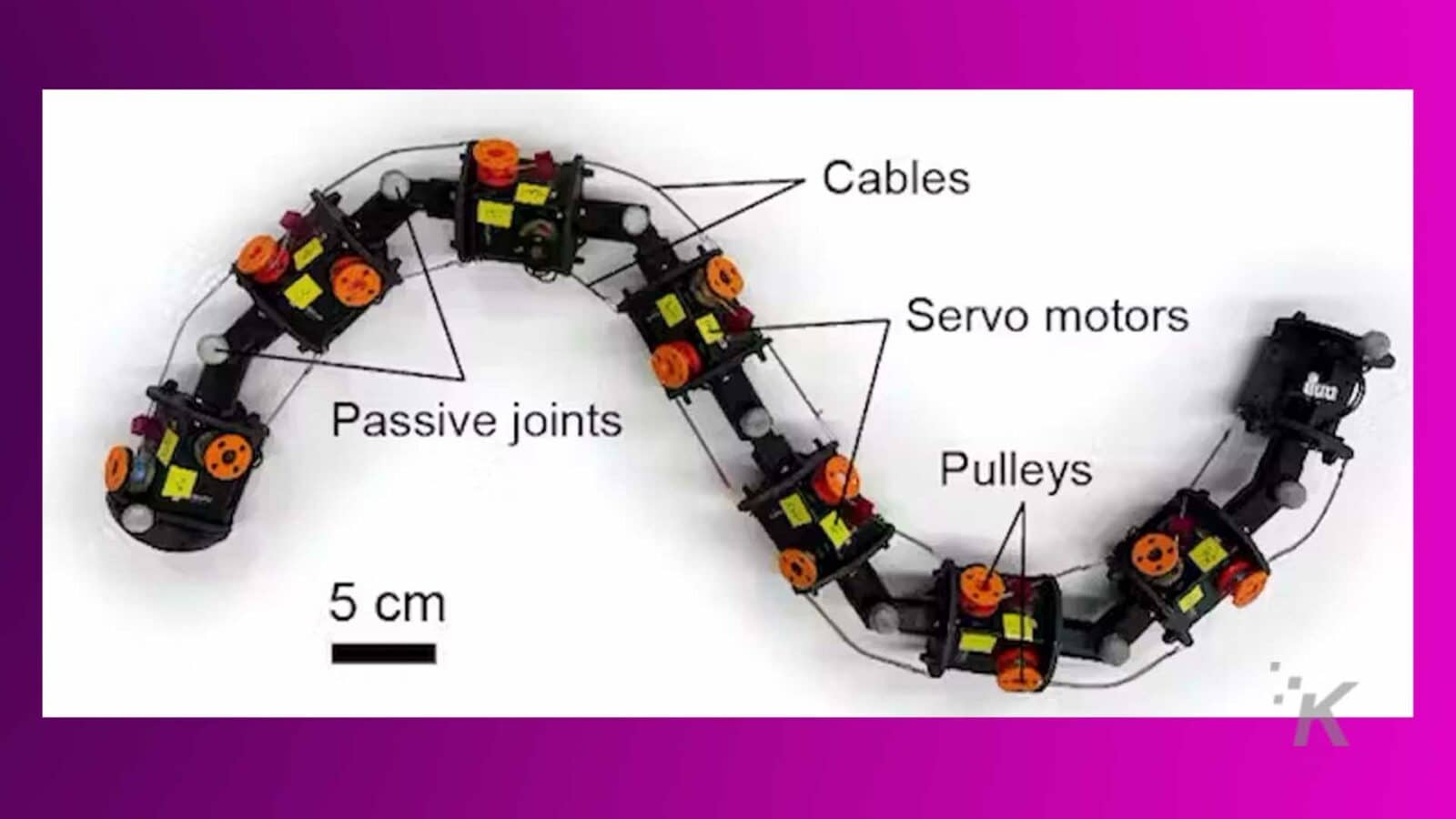
Чтобы разобраться в этом вопросе, наша команда создала нового робота под названием MILLR, механически интеллектуального робота без конечностей, вдохновленного двумя полосами мышц змей и червей.
MILLR имеет два независимо управляемых троса, которые тянут каждое соединение влево и вправо в двустороннем порядке.
Мы обнаружили, что этот метод позволяет роботу спонтанно перемещаться вокруг препятствий, не ощущая окружения, и активно менять положение своего тела, чтобы соответствовать окружающей среде.
Создание механически интеллектуального робота
Вместо того, чтобы имитировать детальную мышечную анатомию конкретного организма, MILLR применяет силы к обеим сторонам тела, наматывая и разматывая кабель.
Таким образом, это отражает методы активации мышц, которые используют змеи и нематоды, когда левая и правая стороны активируются по очереди.
Этот режим активации тянет тело в ту или иную сторону, напрягая одну сторону, в то время как другая сторона расслабляется и пассивно тянется вперед.
Изменяя величину провисания тросов, мы можем добиться различной степени жесткости кузова.
Когда робот сталкивается с препятствием, в зависимости от натяжения троса он выборочно сохраняет свою форму или изгибается под силой препятствия.
Мы обнаружили, что если робот активно наклонялся в одну сторону и на него действовала сила в том же направлении, тело подчинялось этой силе и сгибалось дальше.
Если бы, наоборот, на робота воздействовала сила, противодействующая изгибу, он остался бы неподвижным и оттолкнулся бы от препятствия.
Из-за характера напряжения вдоль тела лобовые столкновения, которые обычно заставляли бы робота останавливаться или застревать, естественным образом приводили к перенаправлению вокруг препятствия.
Робот мог последовательно двигаться вперед.
Тестирование МИЛЛР
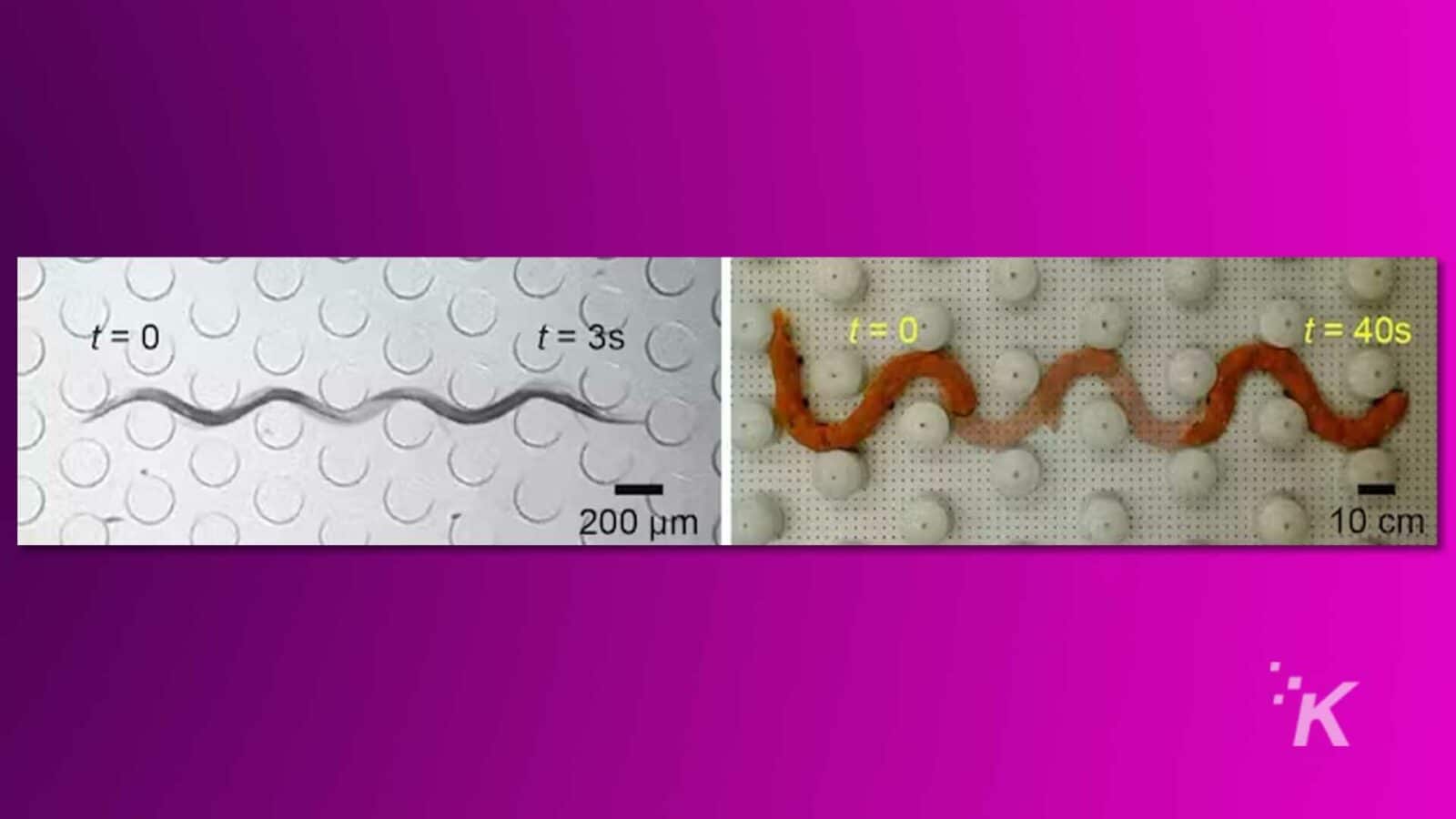
Чтобы изучить преимущества механического интеллекта, мы построили крошечные полосы препятствий и отправили через них червей-нематод, чтобы посмотреть, насколько хорошо они справятся.
Мы отправили MILLR пройти аналогичный курс и сравнили результаты. MILLR двигался по своему пути примерно так же эффективно, как и настоящие черви.
Мы заметили, что при столкновении с препятствиями черви совершали такие же движения тела, как и MILLR. Принципы механического интеллекта могут выйти за рамки нематод.
Будущие исследования могут быть направлены на создание роботов на основе множества других типов организмов для различных применений, от поиска и спасения до исследования других планет.
Рекомендации редакции:
- Конфиденциальность данных, как и воспитание детей, — это коллективное усилие.
- Выживание ChatGPT поставлено на карту в иске New York Times
- Люди и ChatGPT отражают общие языковые шаблоны – вот как
- ChatGPT и другие языковые ИИ так же иррациональны, как и мы.
Примечание редактора. Эту статью написал Тянью Ван, доктор философии. Студент кафедры робототехники Технологического института Джорджии и Кристофер Пирс, постдокторант по физике Технологического института Джорджии, переиздано из The Conversation под лицензией Creative Commons. Прочитайте оригинальную статью e.