
หุ่นยนต์ที่มีลักษณะคล้ายหนอนจะช่วยเหลือทีมค้นหาและกู้ภัยในอนาคตในไม่ช้า
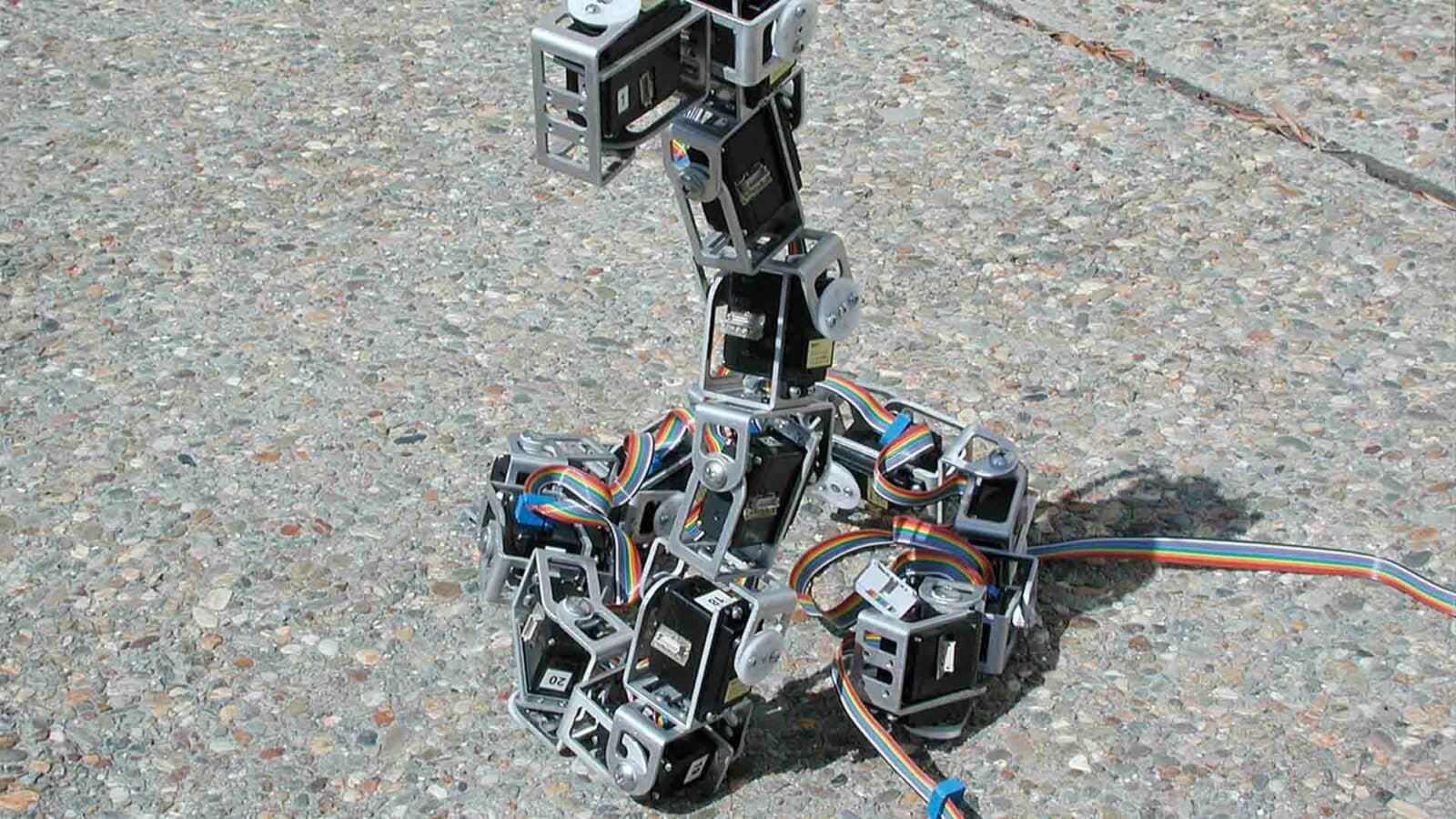
เผยแพร่แล้ว: 2024-02-25นักวิทยาศาสตร์พยายามสร้างหุ่นยนต์ที่มีรูปร่างคล้ายงูและไม่มีแขนขามานานหลายทศวรรษ หุ่นยนต์เหล่านี้อาจมีประโยชน์ในสถานการณ์การค้นหาและช่วยเหลือ โดยพวกเขาสามารถนำทางอาคารที่พังทลายเพื่อค้นหาและช่วยเหลือผู้รอดชีวิต
ด้วยรูปร่างที่เพรียวบางและยืดหยุ่น หุ่นยนต์ไร้แขนขาจึงสามารถเคลื่อนที่ผ่านพื้นที่จำกัดและรก เช่น ทุ่งขยะ ซึ่งหุ่นยนต์เดินหรือล้อเลื่อนและผู้ช่วยเหลือมนุษย์มีแนวโน้มที่จะล้มเหลว
อย่างไรก็ตาม แม้แต่หุ่นยนต์ไร้แขนขาที่ล้ำสมัยที่สุดก็ยังไม่สามารถเคลื่อนไหวได้ใกล้เคียงกับความคล่องตัวและความคล่องตัวของหนอนและงูในภูมิประเทศที่ยากลำบาก
แม้แต่หนอนไส้เดือนฝอยตัวเล็ก ๆ Caenorhabditis elegans ซึ่งมีระบบประสาทที่ค่อนข้างง่ายก็สามารถเคลื่อนที่ผ่านสภาพแวดล้อมทางกายภาพที่ยากลำบากได้
ในฐานะส่วนหนึ่งของทีมวิศวกร นักหุ่นยนต์ และนักฟิสิกส์ เราต้องการสำรวจความคลาดเคลื่อนด้านประสิทธิภาพนี้ แต่แทนที่จะมองหาคำตอบจากประสาทวิทยาศาสตร์ เราหันไปหาชีวกลศาสตร์
เรามุ่งมั่นที่จะสร้างโมเดลหุ่นยนต์ที่ขับเคลื่อนร่างกายโดยใช้กลไกที่คล้ายคลึงกับวิธีที่หนอนและงูขับเคลื่อนการเคลื่อนไหวของพวกมัน
ลูกคลื่นและสติปัญญาทางกล
เป็นเวลาหลายพันปีมาแล้วที่สิ่งมีชีวิตได้พัฒนาระบบประสาทที่ซับซ้อน ซึ่งช่วยให้พวกมันรับรู้ถึงสภาพแวดล้อมทางกายภาพ ประมวลผลข้อมูลนี้ และเคลื่อนไหวร่างกายอย่างแม่นยำเพื่อสำรวจสิ่งกีดขวาง
ในวิทยาการหุ่นยนต์ วิศวกรออกแบบอัลกอริธึมที่รับข้อมูลจากเซ็นเซอร์บนร่างกายของหุ่นยนต์ ซึ่งเป็นระบบประสาทของหุ่นยนต์ประเภทหนึ่ง และใช้ข้อมูลนั้นเพื่อตัดสินใจว่าจะเคลื่อนไหวอย่างไร อัลกอริธึมและระบบเหล่านี้มักจะซับซ้อน
ทีมงานของเราต้องการหาวิธีที่จะทำให้ระบบเหล่านี้ง่ายขึ้นโดยเน้นวิธีการควบคุมด้วยกลไกเพื่อจัดการกับอุปสรรคที่ไม่ต้องใช้เซ็นเซอร์หรือการคำนวณ เพื่อทำเช่นนั้น เรามาดูตัวอย่างจากชีววิทยา
สัตว์ไม่ได้อาศัยเซลล์ประสาทเพียงอย่างเดียว เช่น เซลล์สมองและเส้นประสาทส่วนปลายในการควบคุมการเคลื่อนไหว
พวกเขายังใช้คุณสมบัติทางกายภาพของร่างกาย เช่น ความยืดหยุ่นของกล้ามเนื้อ เพื่อช่วยให้พวกเขาตอบสนองต่อสภาพแวดล้อมได้อย่างเป็นธรรมชาติ ก่อนที่เซลล์ประสาทจะมีโอกาสตอบสนองด้วยซ้ำ
แม้ว่าระบบคอมพิวเตอร์จะอยู่ภายใต้กฎของคณิตศาสตร์ แต่ระบบเครื่องกลจะถูกควบคุมโดยฟิสิกส์ เพื่อให้บรรลุภารกิจเดียวกัน นักวิทยาศาสตร์สามารถออกแบบอัลกอริทึมหรือออกแบบระบบทางกายภาพอย่างระมัดระวัง
ตัวอย่างเช่น หุ่นยนต์และสัตว์ที่ไม่มีแขนขาเคลื่อนที่ไปทั่วโลกโดยการงอส่วนต่างๆ ของร่างกายไปทางซ้ายและขวา ซึ่งเป็นการเคลื่อนไหวประเภทหนึ่งที่เรียกว่าคลื่น
หากชนกับสิ่งกีดขวางจะต้องหันหลังกลับและอ้อมไปด้านหนึ่งมากกว่าอีกด้านหนึ่ง นักวิทยาศาสตร์สามารถบรรลุเป้าหมายนี้ได้ด้วยหุ่นยนต์โดยติดเซ็นเซอร์ไว้ที่หัวหรือลำตัว
จากนั้นพวกเขาสามารถออกแบบอัลกอริธึมที่บอกให้หุ่นยนต์หันหลังกลับหรือหมุนไปรอบๆ สิ่งกีดขวางเมื่อ "รู้สึก" มีแรงมากพอที่ศีรษะหรือลำตัว
นักวิทยาศาสตร์สามารถเลือกวัสดุของหุ่นยนต์ ตลอดจนการจัดวางและความแข็งแกร่งของมอเตอร์อย่างระมัดระวัง เพื่อให้การชนกันทำให้เกิดรูปร่างที่นำไปสู่การเลี้ยวได้เอง
หุ่นยนต์ตัวนี้จะมีสิ่งที่นักวิทยาศาสตร์เรียกว่า "ความฉลาดทางกล"
หากนักวิทยาศาสตร์เช่นเราสามารถเข้าใจว่าร่างกายของสิ่งมีชีวิตตอบสนองทางกลไกอย่างไรเมื่อสัมผัสกับวัตถุในสภาพแวดล้อมของมัน เราก็สามารถออกแบบหุ่นยนต์ที่ดีกว่าซึ่งสามารถจัดการกับอุปสรรคได้โดยไม่ต้องตั้งโปรแกรมอัลกอริธึมที่ซับซ้อน
หากคุณเปรียบเทียบสิ่งมีชีวิตลูกคลื่นหลากหลายชนิดกับสวนสัตว์หุ่นยนต์ "งู" ที่ใหญ่ขึ้นเรื่อยๆ สิ่งหนึ่งที่เห็นความแตกต่างระหว่างหุ่นยนต์กับลูกคลื่นทางชีวภาพก็โดดเด่น
หุ่นยนต์ลูกคลื่นเกือบทั้งหมดจะงอร่างกายโดยใช้ชุดส่วนที่เชื่อมต่อกันโดยมีมอเตอร์อยู่ที่ข้อต่อแต่ละข้อ แต่นั่นไม่ใช่วิธีที่สิ่งมีชีวิตโค้งงอ
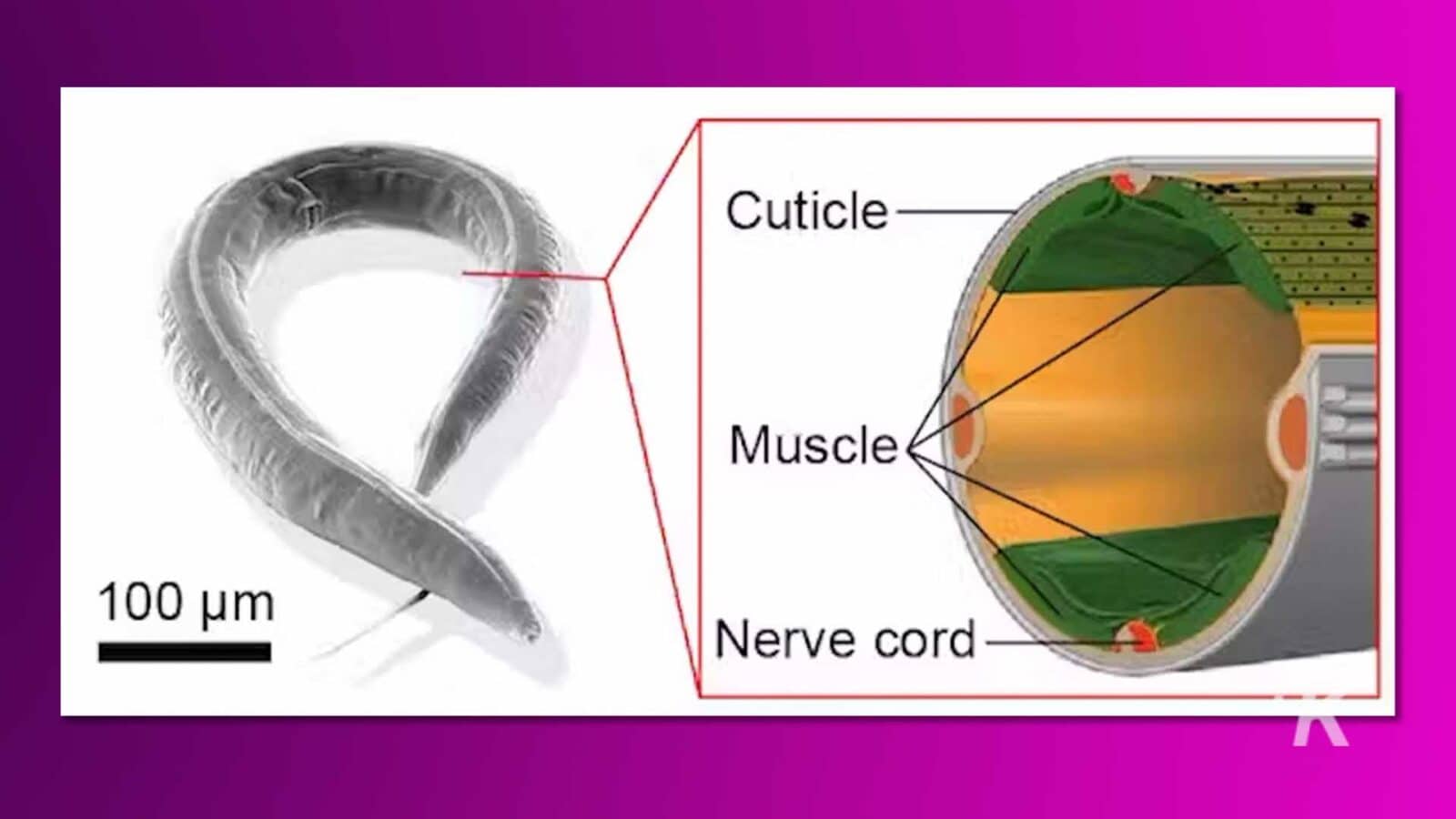
ในทางตรงกันข้าม สิ่งมีชีวิตที่ไม่มีแขนขาทั้งหมด ตั้งแต่งูขนาดใหญ่ไปจนถึงตัวไส้เดือนฝอยที่มีขนาดเล็กมาก จะสามารถโค้งงอได้ ไม่ใช่จากระบบข้อต่อแบบหมุนเพียงระบบเดียว แต่กลับโค้งงอโดยใช้กล้ามเนื้อสองแถบที่ข้างใดข้างหนึ่งของร่างกาย
สำหรับวิศวกร การออกแบบนี้ดูขัดกับสัญชาตญาณ ทำไมต้องควบคุมบางสิ่งด้วยกล้ามเนื้อหรือมอเตอร์สองตัวในเมื่อคนเราสามารถทำงานได้?
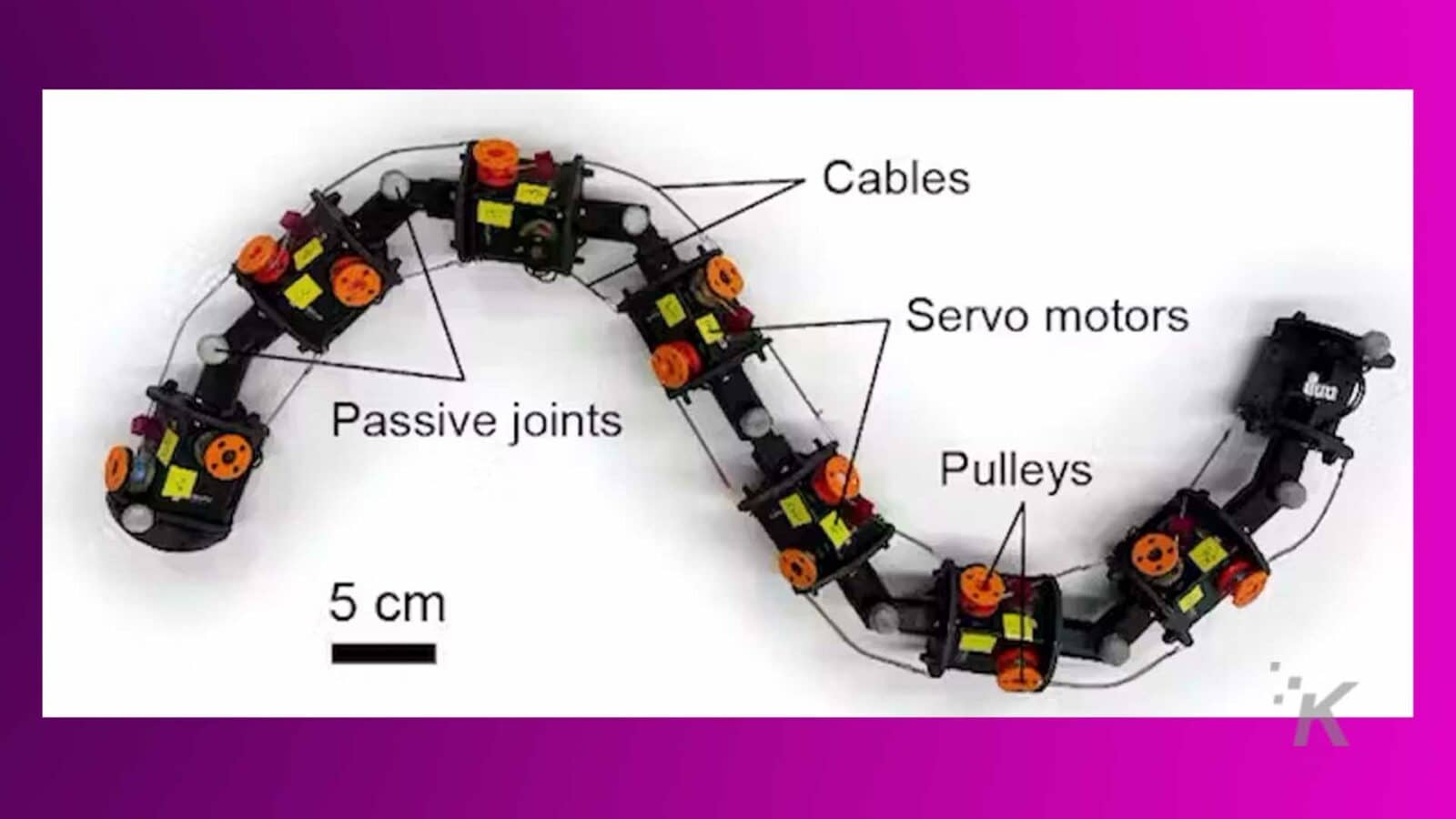
เพื่อตอบคำถามนี้ ทีมงานของเราได้สร้างหุ่นยนต์ตัวใหม่ชื่อ MILLR สำหรับหุ่นยนต์ไร้แขนขาที่ชาญฉลาดทางกลไก ซึ่งได้รับแรงบันดาลใจจากแถบกล้ามเนื้อสองแถบบนงูและหนอน
MILLR มีสายเคเบิลควบคุมแยกกันสองเส้นที่ดึงข้อต่อแต่ละด้านไปทางซ้ายและขวาแบบทวิภาคี
เราพบว่าวิธีนี้ช่วยให้หุ่นยนต์สามารถเคลื่อนที่ไปรอบๆ สิ่งกีดขวางได้เองโดยไม่ต้องรับรู้ถึงสภาพแวดล้อม และเปลี่ยนท่าทางของร่างกายให้สอดคล้องกับสภาพแวดล้อม
การสร้างหุ่นยนต์อัจฉริยะด้านกลไก
แทนที่จะเลียนแบบรายละเอียดกายวิภาคของกล้ามเนื้อของสิ่งมีชีวิตชนิดใดชนิดหนึ่ง MILLR จะใช้แรงไปที่ด้านใดด้านหนึ่งของร่างกายโดยการเก็บสายและคลายสายเคเบิล
ด้วยวิธีนี้ จะสะท้อนวิธีการกระตุ้นกล้ามเนื้อที่งูและไส้เดือนฝอยใช้ โดยที่ด้านซ้ายและด้านขวาจะผลัดกันเปิดใช้งาน
โหมดการเปิดใช้งานนี้จะดึงร่างกายไปทางใดด้านหนึ่งโดยการเกร็งด้านหนึ่ง ในขณะที่อีกด้านจะผ่อนคลายและถูกดึงไปอย่างอดทน
ด้วยการเปลี่ยนปริมาณการหย่อนของสายเคเบิล เราจึงสามารถมีระดับความแข็งของร่างกายที่แตกต่างกันได้
เมื่อหุ่นยนต์ชนกับสิ่งกีดขวาง ขึ้นอยู่กับความตึงของสายเคเบิล หุ่นยนต์จะรักษารูปร่างหรือโค้งงอภายใต้แรงของสิ่งกีดขวางโดยเลือก
เราพบว่าหากหุ่นยนต์ก้มตัวไปด้านใดด้านหนึ่งอย่างแข็งขันและมีแรงไปในทิศทางเดียวกัน ร่างกายจะปฏิบัติตามแรงและโค้งงอต่อไป
ในทางกลับกัน หากหุ่นยนต์ประสบกับแรงที่ต้านการโค้งงอ หุ่นยนต์ก็จะยังคงแข็งแกร่งและดันตัวเองออกจากสิ่งกีดขวาง
เนื่องจากรูปแบบของความตึงเครียดตามร่างกาย การชนกันของศีรษะซึ่งปกติแล้วจะทำให้หุ่นยนต์หยุดเคลื่อนไหวหรือติดขัดแทนจะนำไปสู่การเปลี่ยนเส้นทางไปรอบๆ สิ่งกีดขวาง
หุ่นยนต์สามารถดันตัวเองไปข้างหน้าได้อย่างสม่ำเสมอ
การทดสอบ MILLR
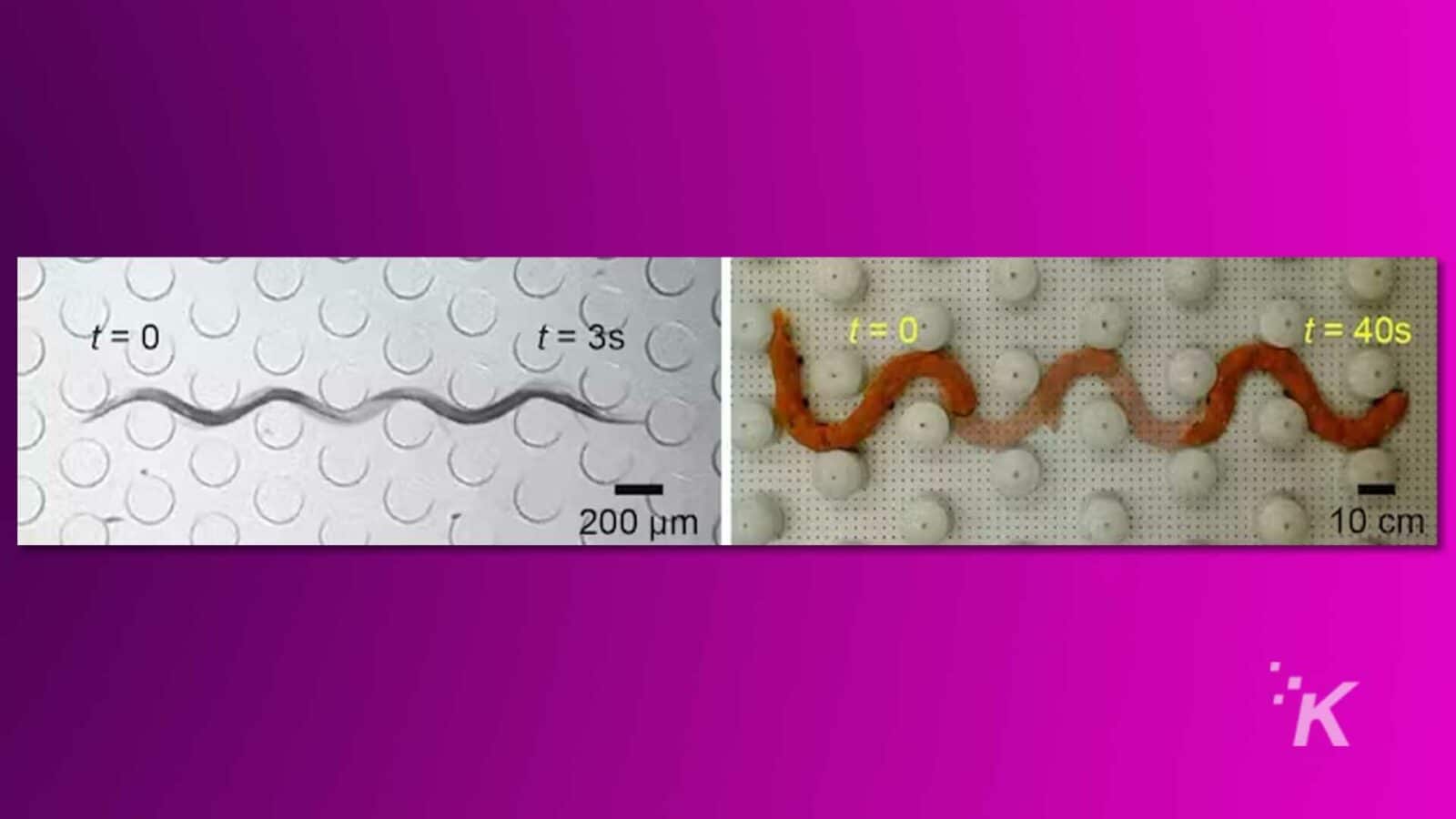
เพื่อตรวจสอบประโยชน์ของความฉลาดทางกล เราได้สร้างเส้นทางสิ่งกีดขวางเล็กๆ และส่งหนอนไส้เดือนฝอยผ่านพวกมันเพื่อดูว่าพวกมันทำงานได้ดีเพียงใด
เราส่ง MILLR ผ่านหลักสูตรที่คล้ายกันและเปรียบเทียบผลลัพธ์ MILLR ดำเนินไปอย่างมีประสิทธิภาพพอๆ กับหนอนจริง
เราสังเกตเห็นว่าหนอนมีการเคลื่อนไหวร่างกายแบบเดียวกันเมื่อพวกมันชนกับสิ่งกีดขวางเหมือนกับที่ MILLR ทำ หลักการของความฉลาดทางกลสามารถขยายออกไปเกินขอบเขตของไส้เดือนฝอยได้
การวิจัยในอนาคตอาจพิจารณาถึงการออกแบบหุ่นยนต์โดยอาศัยสิ่งมีชีวิตประเภทอื่นๆ สำหรับการใช้งานตั้งแต่การค้นหาและช่วยเหลือไปจนถึงการสำรวจดาวเคราะห์ดวงอื่น
คำแนะนำของบรรณาธิการ:
- ความเป็นส่วนตัวของข้อมูล เช่น การเลี้ยงดูบุตร เป็นความพยายามร่วมกัน
- ความอยู่รอดของ ChatGPT เป็นเดิมพันในคดีของ New York Times
- Humans และ ChatGPT สะท้อนรูปแบบภาษาซึ่งกันและกัน - มีวิธีดังนี้
- ChatGPT และ AI ภาษาอื่นๆ ก็ไร้เหตุผลพอๆ กับเรา
หมายเหตุบรรณาธิการ: บทความนี้เขียนโดย Tianyu Wang, Ph.D. นักศึกษาสาขาวิทยาการหุ่นยนต์, Georgia Institute of Technology และ Christopher Pierce, นักวิชาการหลังปริญญาเอกสาขาฟิสิกส์, Georgia Institute of Technology และเผยแพร่ซ้ำจาก The Conversation ภายใต้ใบอนุญาต Creative Commons อ่าน บทความต้นฉบับ e