
Solucan benzeri robotlar yakında gelecekteki arama ve kurtarma ekiplerine yardımcı olacak
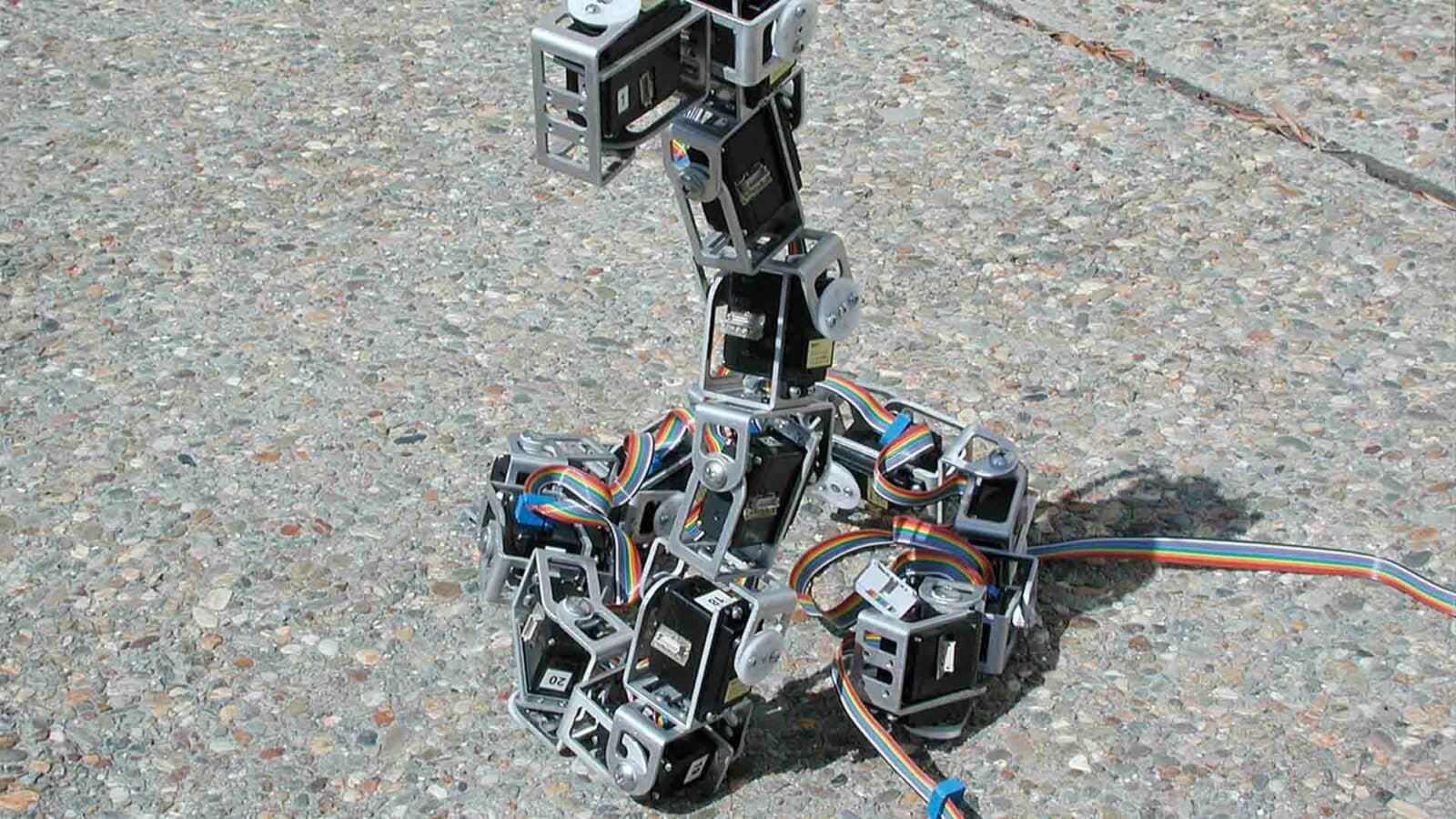
Yayınlanan: 2024-02-25Bilim insanları onlarca yıldır yılana benzer, uzuvsuz robotlar yapmaya çalışıyor. Bu robotlar, hayatta kalanları bulmak ve onlara yardım etmek için çökmüş binalarda gezinebilecekleri arama kurtarma durumlarında kullanışlı olabilir.
İnce, esnek gövdeleri olan uzuvsuz robotlar, yürüyen veya tekerlekli robotların ve insan kurtarıcıların başarısız olma eğiliminde olduğu enkaz alanları gibi kapalı ve karmaşık alanlarda kolaylıkla hareket edebilir.
Ancak en gelişmiş uzuvsuz robotlar bile zorlu arazilerde solucanların ve yılanların çevikliği ve çok yönlülüğü ile hareket etmeye yaklaşamadı.
Nispeten basit bir sinir sistemine sahip olan küçük nematod solucanı Caenorhabditis elegans bile zorlu fiziksel ortamlarda gezinebilir.
Mühendislerden, robot bilimcilerden ve fizikçilerden oluşan bir ekibin parçası olarak performanstaki bu farklılığı araştırmak istedik. Ancak cevap için sinir bilimine bakmak yerine biyomekaniğe yöneldik.
Solucanların ve yılanların hareketlerine güç vermesine benzer bir mekanizma kullanarak vücudunu hareket ettiren bir robot modeli oluşturmaya başladık.
Dalgalandırıcılar ve mekanik zeka
Binlerce yıl boyunca organizmalar, fiziksel çevrelerini hissetmelerine, bu bilgiyi işlemelerine ve engellerin etrafından dolaşmak için hassas vücut hareketleri gerçekleştirmelerine olanak tanıyan karmaşık sinir sistemleri geliştirdiler.
Robotik alanında mühendisler, robotun vücudundaki sensörlerden (bir tür robotik sinir sistemi) bilgi alan algoritmalar tasarlar ve bu bilgiyi nasıl hareket edeceğine karar vermek için kullanır. Bu algoritmalar ve sistemler genellikle karmaşıktır.
Ekibimiz, sensörler veya hesaplama gerektirmeyen engellerle başa çıkmak için mekanik olarak kontrol edilen yaklaşımları vurgulayarak bu sistemleri basitleştirmenin bir yolunu bulmak istedi. Bunu yapmak için biyolojiden örneklere yöneldik.
Hayvanlar hareketi kontrol etmek için yalnızca nöronlarına (beyin hücreleri ve çevresel sinirler) güvenmezler.
Ayrıca, nöronların tepki verme şansına bile sahip olmadan, çevrelerine kendiliğinden tepki vermelerine yardımcı olmak için vücutlarının fiziksel özelliklerini (örneğin kaslarının esnekliğini) kullanırlar.
Hesaplamalı sistemler matematik yasalarıyla yönetilirken, mekanik sistemler fizikle yönetilir. Aynı görevi başarmak için bilim insanları ya bir algoritma tasarlayabilir ya da dikkatli bir şekilde fiziksel bir sistem tasarlayabilir.
Örneğin, uzuvsuz robotlar ve hayvanlar, vücutlarının bazı kısımlarını sola ve sağa bükerek, dalgalanma adı verilen bir hareket türüyle dünya üzerinde hareket ederler.
Bir engele çarptıklarında geri dönüp bir tarafa daha fazla eğilerek etrafından dolaşmak zorunda kalıyorlar. Bilim insanları bunu bir robotun kafasına veya gövdesine sensörler takarak başarabilirler.
Daha sonra, kafasında veya vücudunda yeterince büyük bir kuvvet "hissedildiğinde" robota geri dönmesini veya engelin etrafından dolanmasını söyleyen bir algoritma tasarlayabilirler.
Alternatif olarak bilim insanları, çarpışmaların kendiliğinden dönüşe yol açan bir vücut şekli oluşturabilmesi için robotun malzemelerini ve motorlarının düzenini ve gücünü dikkatlice seçebilirler.
Bu robot, bilim adamlarının "mekanik zeka" dediği şeye sahip olacak.
Bizim gibi bilim insanları, organizmaların vücutlarının çevrelerindeki nesnelerle temasa mekanik olarak nasıl tepki verdiğini anlayabilirlerse, karmaşık algoritmalar programlamaya gerek kalmadan engellerle başa çıkabilen daha iyi robotlar tasarlayabiliriz.
Dalgalı organizmalardan oluşan çeşitli bir kümeyi giderek büyüyen robotik "yılanlar" hayvanat bahçesiyle karşılaştırırsanız, robotlar ile biyolojik dalgalandırıcılar arasındaki bir fark göze çarpıyor.
Neredeyse tüm dalgalı robotlar, her ekleminde motor bulunan bir dizi bağlantılı parçayı kullanarak vücutlarını büker. Ancak canlı organizmalar bu şekilde bükülmez.
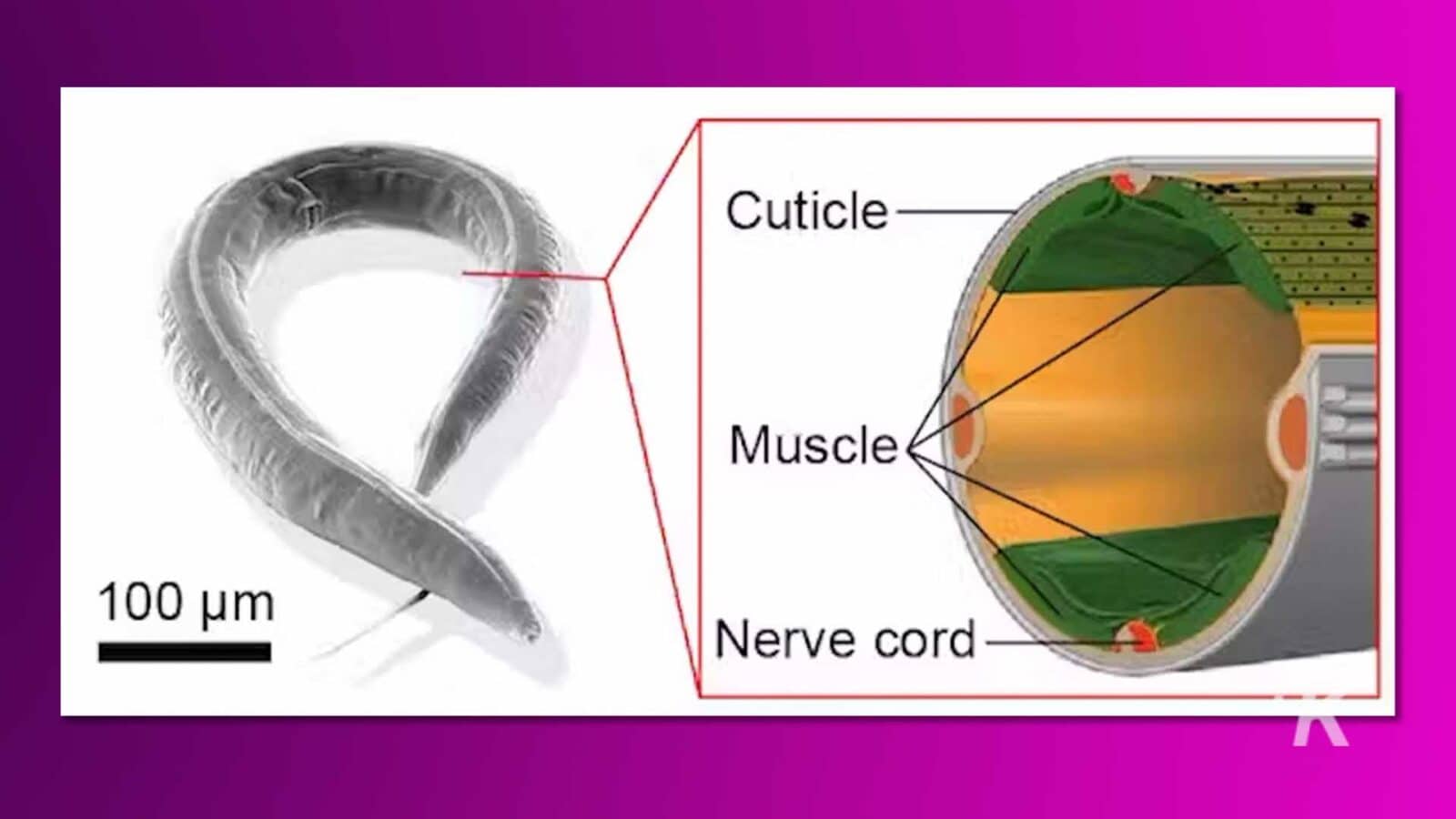
Buna karşılık, büyük yılanlardan mikroskobik nematoda kadar tüm uzuvsuz organizmalar, bükülmeleri tek bir döner eklem-motor sistemiyle değil, vücudun her iki tarafındaki iki kas bandı aracılığıyla gerçekleştirir.
Bir mühendis için bu tasarım mantığa aykırı görünüyor. Bir işi yapabilecekken neden iki kas veya motorla bir şeyi kontrol edesiniz ki?
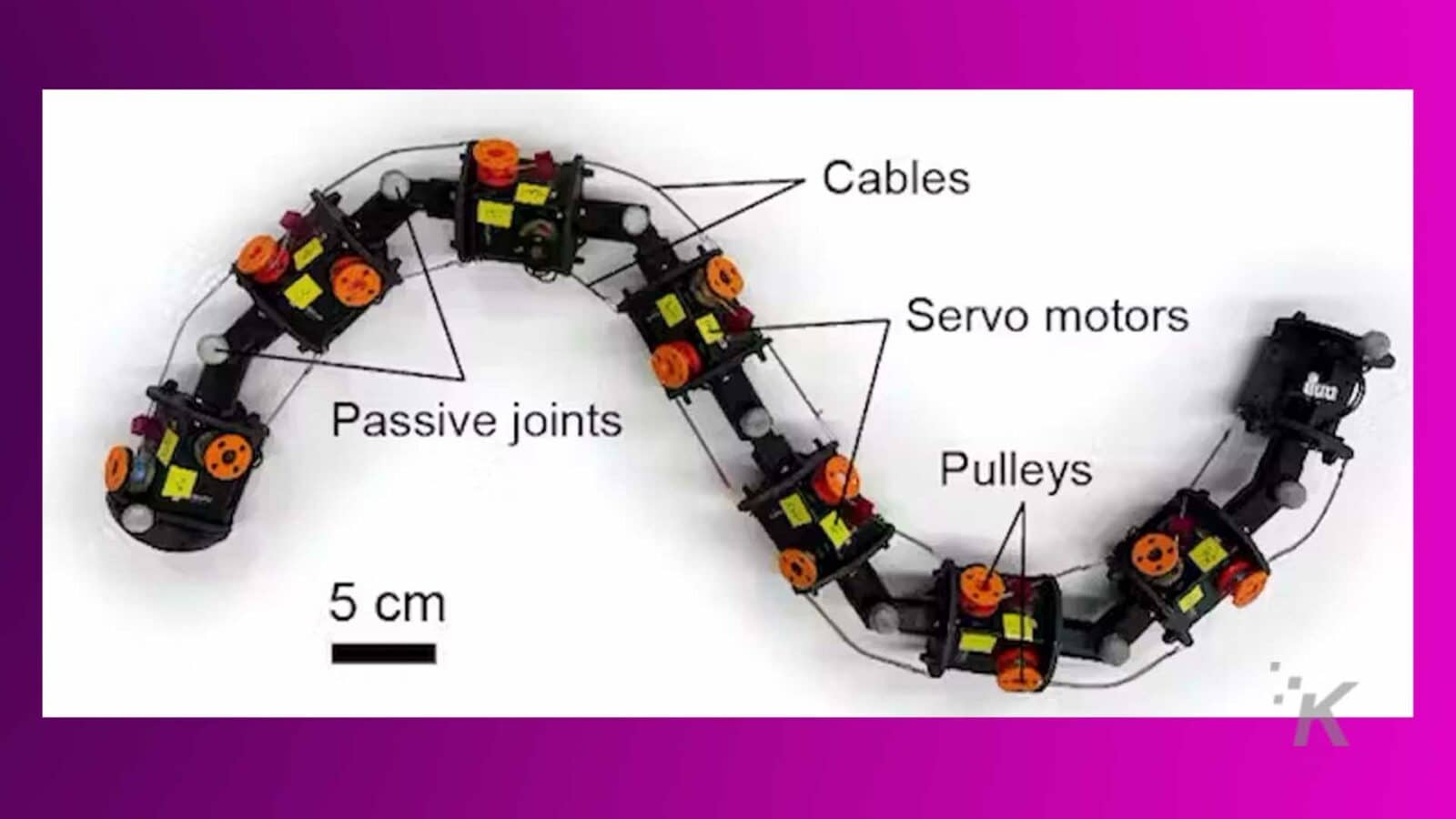
Bu sorunun temeline inmek için ekibimiz, yılanlar ve solucanlar üzerindeki iki kas bandından esinlenerek, mekanik olarak akıllı uzuvsuz robot için MILLR adında yeni bir robot yaptı.
MILLR, her bir eklemi iki taraflı olarak sola ve sağa çeken, bağımsız olarak kontrol edilen iki kabloya sahiptir.
Bu yöntemin, robotun çevresini algılamaya gerek kalmadan engellerin etrafında kendiliğinden hareket etmesine ve çevreye uyum sağlamak için vücut duruşunu aktif olarak değiştirmesine olanak tanıdığını bulduk.
Mekanik olarak akıllı bir robot inşa etmek
MILLR, belirli bir organizmanın ayrıntılı kas anatomisini taklit etmek yerine, bir kabloyu sararak ve açarak vücudun her iki tarafına da kuvvet uyguluyor.
Bu şekilde, yılanların ve nematodların kullandığı, sol ve sağ tarafların sırayla harekete geçtiği kas aktivasyon yöntemlerini yansıtır.
Bu aktivasyon modu, bir taraftan kasılarak vücudu bir tarafa veya diğerine doğru çekerken, diğer taraf gevşeyip pasif olarak çekilir.
Kablolardaki gevşeklik miktarını değiştirerek değişen derecelerde vücut sertliği elde edebiliriz.
Robot bir engelle çarpıştığında kablo gerginliğine bağlı olarak seçici olarak şeklini korur veya engelin kuvveti altında bükülür.
Robot aktif olarak bir tarafa doğru eğiliyorsa ve aynı yönde bir kuvvete maruz kalıyorsa gövdenin bu kuvvete uyum sağladığını ve daha fazla eğildiğini gördük.
Alternatif olarak robot, bükülmeye karşı çıkan bir kuvvetle karşılaştığında katı kalacak ve kendisini engelin üzerinden itecektir.
Gövde boyunca oluşan gerilimin şekli nedeniyle, normalde robotun hareket etmesini durduran veya kendisini sıkıştıran kafa kafaya çarpışmalar, doğal olarak engelin etrafında yeniden yönlenmesine yol açtı.
Robot kendini sürekli olarak ileri itebiliyordu.
MILLR'ı test etmek
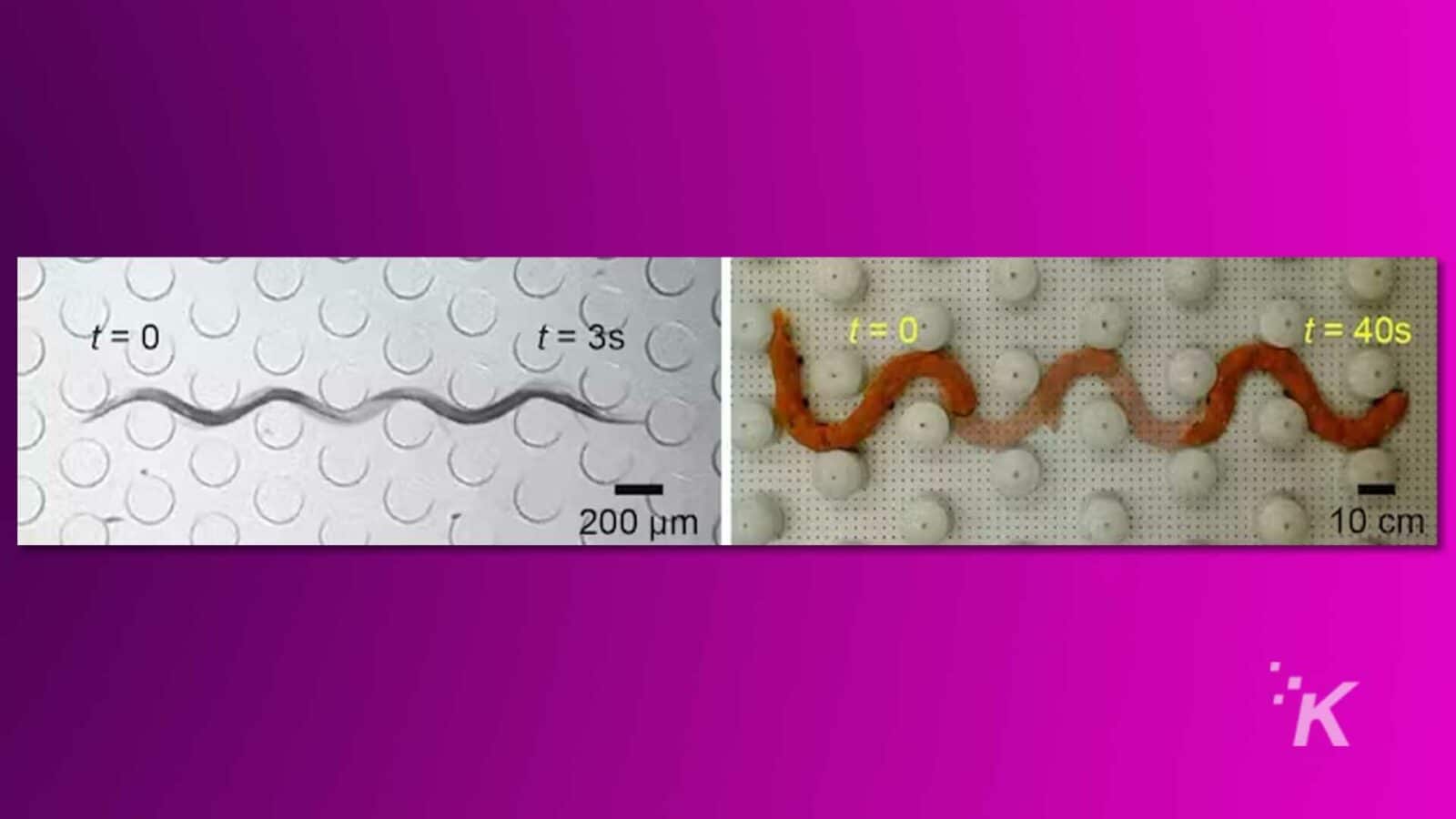
Mekanik zekanın faydalarını araştırmak için küçük engelli parkurlar oluşturduk ve ne kadar iyi performans gösterdiklerini görmek için bu parkurlara nematod solucanları gönderdik.
MILLR'ı da benzer bir kursa gönderdik ve sonuçları karşılaştırdık. MILLR, rotasını neredeyse gerçek solucanlar kadar etkili bir şekilde tamamladı.
Solucanların engellerle çarpıştıklarında MILLR'ın yaptığı gibi aynı tür vücut hareketlerini yaptıklarını fark ettik. Mekanik zekanın ilkeleri nematodların sınırlarının ötesine geçebilir.
Gelecekteki araştırmalar, arama ve kurtarmadan diğer gezegenleri keşfetmeye kadar çeşitli uygulamalar için diğer organizma türlerini temel alan robotlar tasarlamaya bakabilir.
Editörlerin Önerileri:
- Ebeveynlik gibi veri gizliliği de kolektif bir çabadır
- New York Times davasında ChatGPT'nin hayatta kalması tehlikede
- İnsanlar ve ChatGPT ortak dil kalıplarını yansıtır - işte böyle
- ChatGPT ve diğer dil yapay zekaları da bizim kadar mantıksız
Editörün Notu: Bu makale Ph.D. Tianyu Wang tarafından yazılmıştır. Robotik Öğrencisi, Georgia Teknoloji Enstitüsü ve Christopher Pierce, Fizik alanında Doktora Sonrası Araştırmacı, Georgia Teknoloji Enstitüsü ve Creative Commons lisansı altında The Conversation'dan yeniden yayınlanmıştır. Orijinal makaleyi okuyun e.