
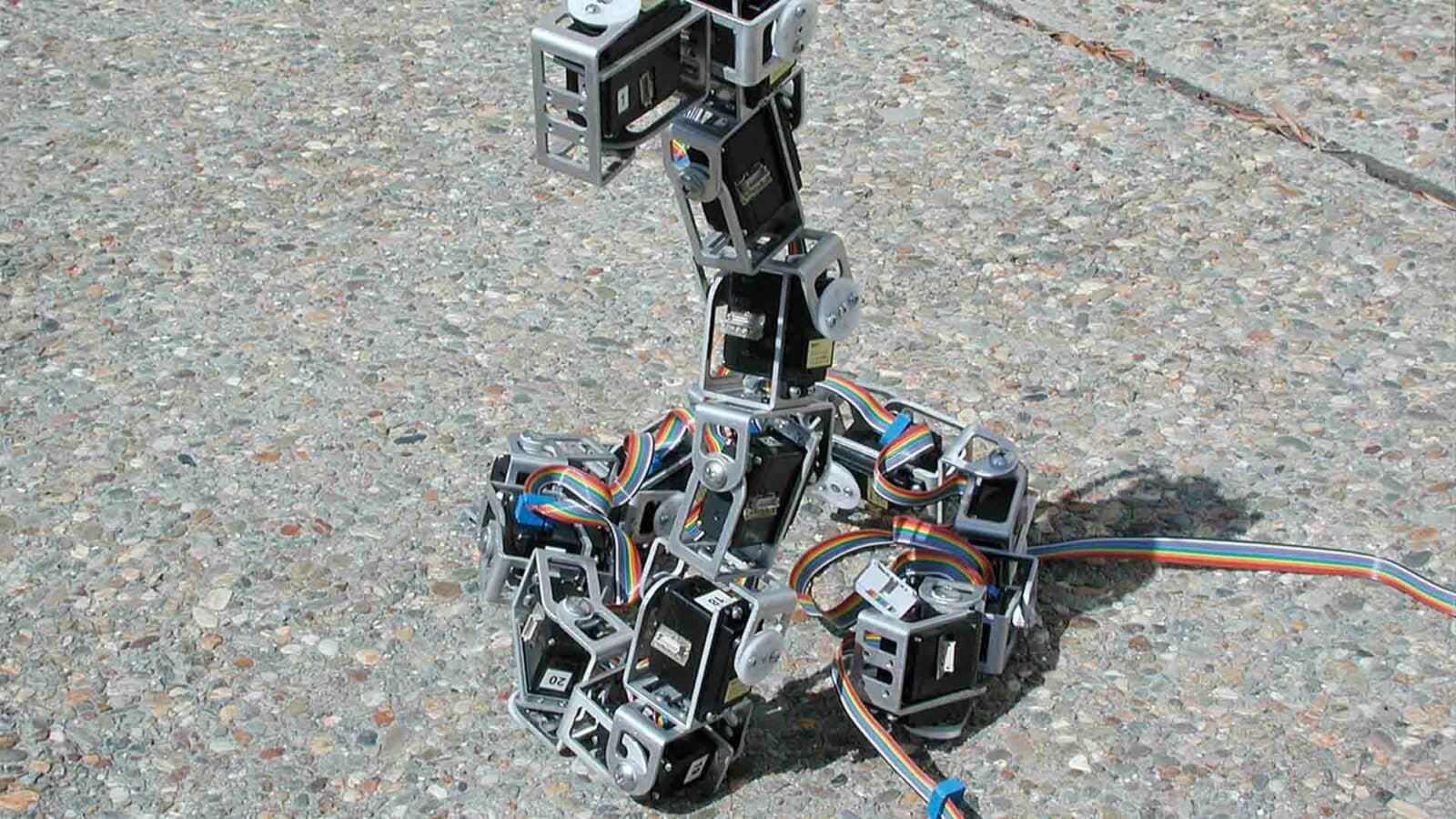
蠕虫状机器人将很快协助未来的搜救队
已发表: 2024-02-25几十年来,科学家们一直在尝试建造蛇形无肢机器人。 这些机器人可以在搜救情况下派上用场,它们可以在倒塌的建筑物中导航以寻找和帮助幸存者。
凭借细长、灵活的身体,无肢机器人可以轻松地穿过狭窄和杂乱的空间,例如废墟场,而步行或轮式机器人和人类救援人员往往会在这些空间中失败。
然而,即使是最先进的无肢机器人也无法像蠕虫和蛇一样在困难地形中灵活移动。
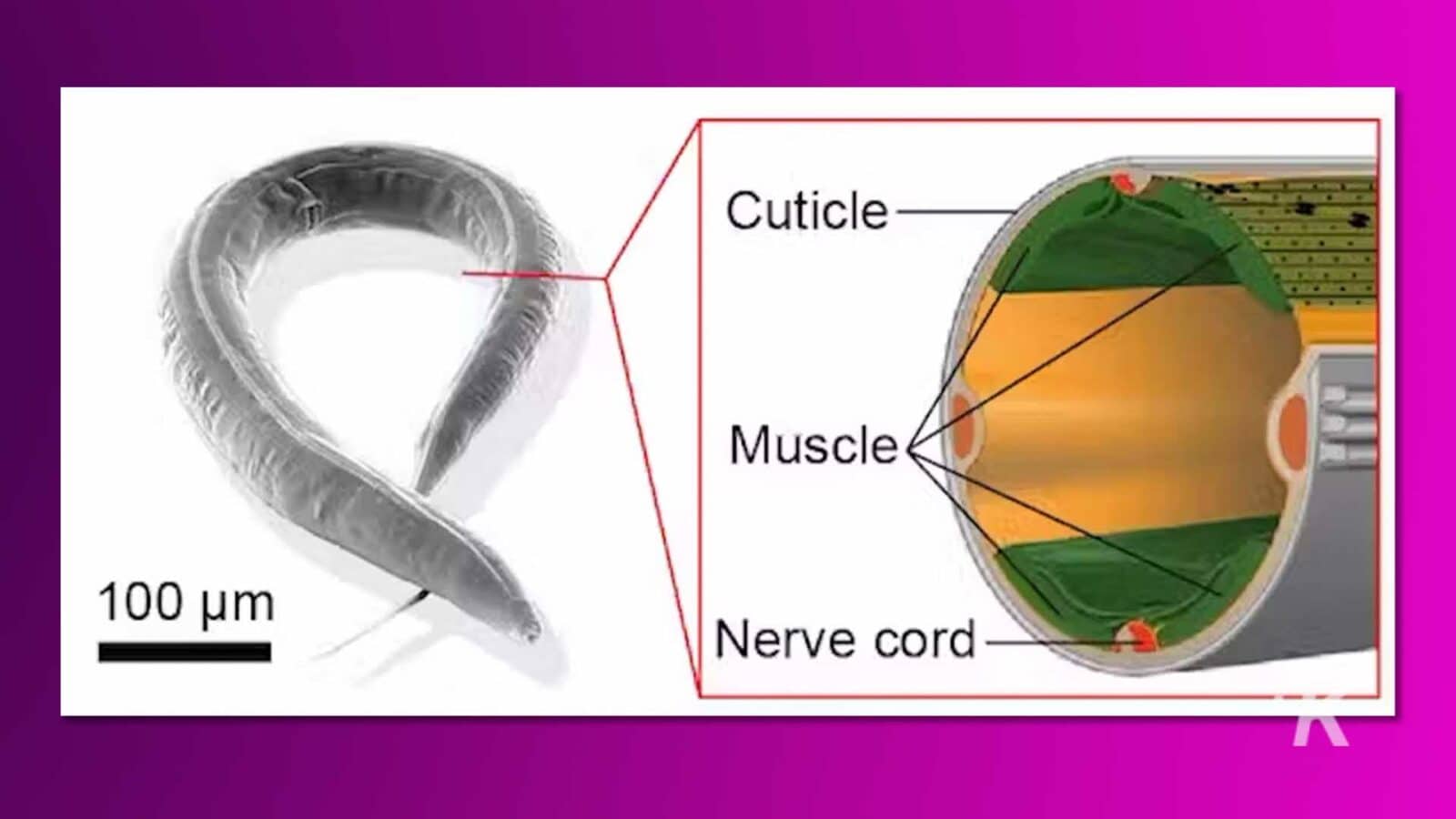
即使是神经系统相对简单的微小线虫秀丽隐杆线虫也能在困难的物理环境中导航。
作为工程师、机器人专家和物理学家团队的一员,我们希望探索这种性能差异。 但我们没有向神经科学寻求答案,而是转向生物力学。
我们着手构建一个机器人模型,该模型使用类似于蠕虫和蛇驱动其运动的机制来驱动其身体。
波荡器和机械智能
数千年来,生物体已经进化出复杂的神经系统,使它们能够感知周围的物理环境,处理这些信息并执行精确的身体运动以绕过障碍物。
在机器人技术中,工程师设计算法,从机器人身体上的传感器(一种机器人神经系统)获取信息,并使用该信息来决定如何移动。 这些算法和系统通常很复杂。
我们的团队希望找到一种简化这些系统的方法,通过强调机械控制的方法来处理不需要传感器或计算的障碍。 为此,我们求助于生物学的例子。
动物不仅仅依靠神经元(脑细胞和周围神经)来控制运动。
他们还利用身体的物理特性(例如肌肉的弹性)来帮助他们在神经元有机会做出反应之前自发地对环境做出反应。
计算系统受数学定律支配,而机械系统则受物理学定律支配。 为了完成同样的任务,科学家可以设计一种算法,或者仔细设计一个物理系统。
例如,无肢机器人和动物通过左右弯曲身体各部分在世界中移动,这种运动称为波动。
如果他们与障碍物相撞,他们必须转身并通过向一侧弯曲比向另一侧弯曲更多来绕过障碍物。 科学家可以通过在机器人的头部或身体上安装传感器来实现这一目标。
然后,他们可以设计一种算法,告诉机器人当“感觉”到头部或身体上有足够大的力时转身离开或绕过障碍物。
或者,科学家可以仔细选择机器人的材料及其电机的布置和强度,以便碰撞会自发地产生导致转弯的身体形状。
这个机器人将拥有科学家所说的“机械智能”。
如果像我们这样的科学家能够理解生物体如何对其环境中的物体接触做出机械反应,我们就可以设计出更好的机器人来处理障碍,而无需编写复杂的算法。
如果将一组多样化的波动生物与日益庞大的机器人“蛇”动物园进行比较,机器人和生物波动器之间的一个区别就会很明显。
几乎所有波动机器人都使用一系列连接的节段来弯曲其身体,每个节段上都有电机。 但这并不是生物体弯曲的方式。
相比之下,所有无肢生物体,从大型蛇到低等的微观线虫,都不是通过单个旋转关节运动系统实现弯曲,而是通过身体两侧的两条肌肉带实现弯曲。
对于工程师来说,这种设计似乎违反直觉。 当一个人可以完成这项工作时,为什么还要用两块肌肉或电机来控制某物呢?
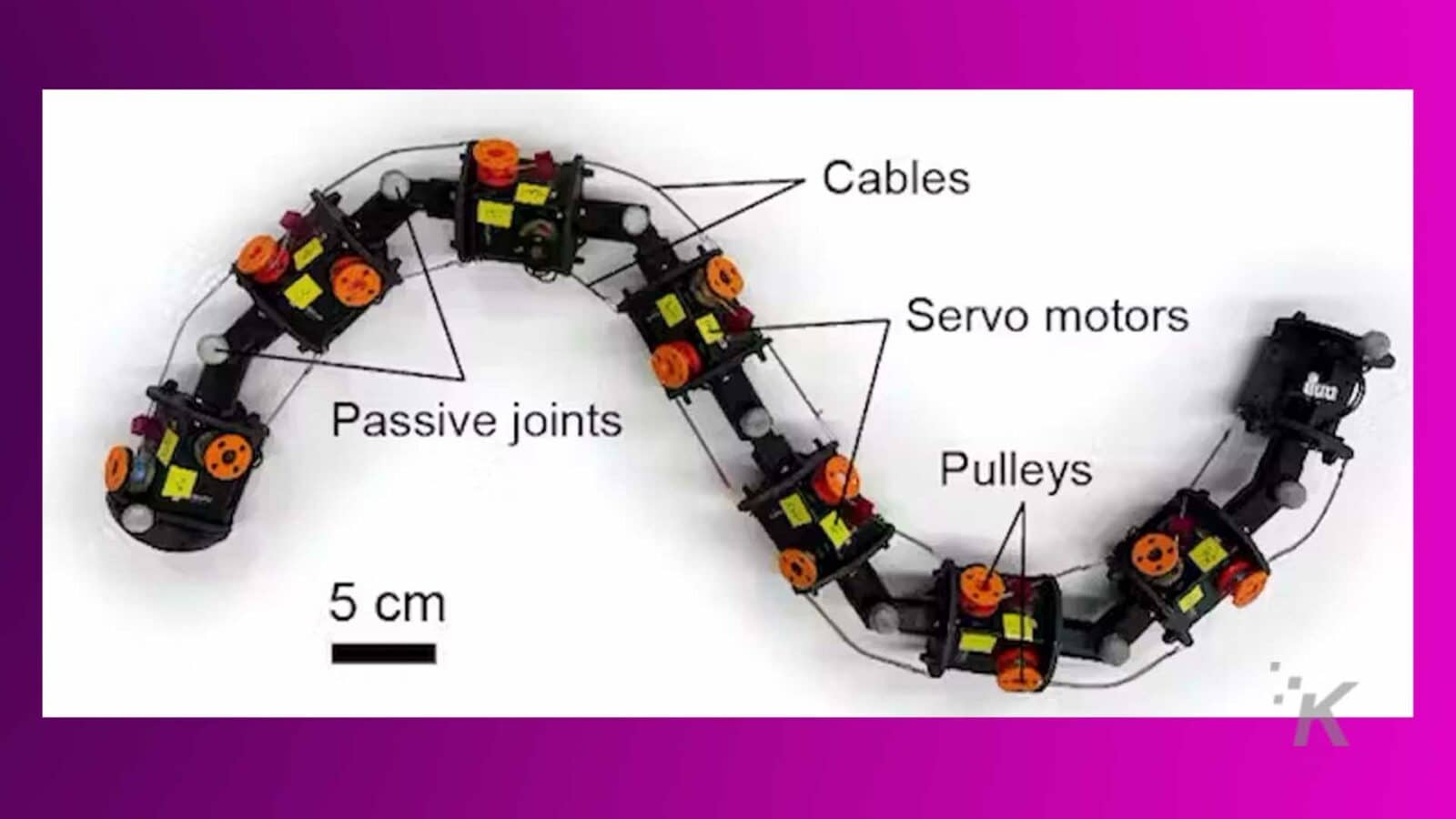
为了弄清这个问题的真相,我们的团队受蛇和蠕虫身上两条肌肉带的启发,建造了一个名为 MILLR 的新型机器人,即机械智能无肢机器人。
MILLR 有两条独立控制的电缆,可以左右两侧拉动每个关节。
我们发现这种方法可以让机器人自发地绕过障碍物移动,而无需感知周围环境并主动改变身体姿势以适应环境。
构建机械智能机器人
MILLR 不是模仿特定生物体的详细肌肉解剖结构,而是通过缠绕和松开电缆向身体的两侧施加力。
这样,它就反映了蛇和线虫使用的肌肉激活方法,即左右两侧轮流激活。
这种激活模式通过收紧一侧将身体拉向一侧或另一侧,而另一侧则放松并被动地被拉动。
通过改变电缆的松弛量,我们可以实现不同程度的车身刚度。
当机器人与障碍物碰撞时,根据电缆张力,它有选择地保持形状或在障碍物的作用力下弯曲。
我们发现,如果机器人主动向一侧弯曲,并且它受到相同方向的力,身体就会顺从该力并进一步弯曲。
或者,如果机器人受到抵抗弯曲的力,它会保持刚性并将自己推离障碍物。
由于身体上的张力模式,正面碰撞通常会导致机器人停止移动或卡住,但实际上会自然地导致机器人绕过障碍物改变方向。
机器人可以不断地推动自己前进。
测试米尔
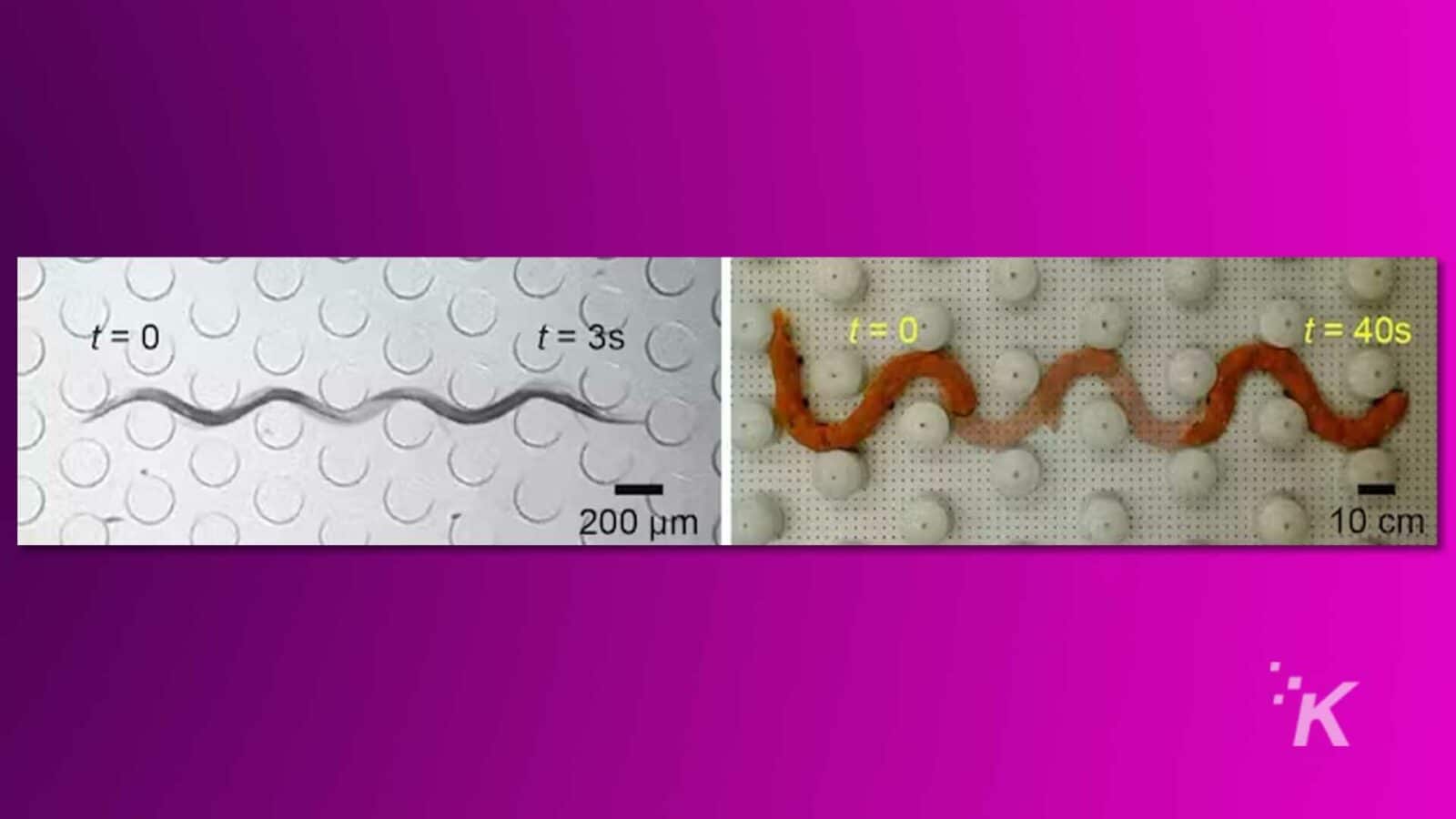
为了研究机械智能的好处,我们建造了微小的障碍训练场,并让线虫穿过它们,看看它们的表现如何。
我们让 MILLR 完成了类似的课程并比较了结果。 MILLR 的移动速度与真正的蠕虫一样有效。
我们注意到,当蠕虫与障碍物碰撞时,它们会做出与 MILLR 相同类型的身体运动。 机械智能的原理可以延伸到线虫的领域之外。
未来的研究可能会着眼于设计基于许多其他类型生物体的机器人,其应用范围从搜索和救援到探索其他行星。
编辑推荐:
- 数据隐私,就像养育子女一样,是集体的努力
- 《纽约时报》诉讼中 ChatGPT 的生存岌岌可危
- 人类和 ChatGPT 反映了共同的语言模式——具体如下
- ChatGPT 和其他语言的人工智能和我们一样不理性
编者按:本文由王天宇博士撰写。 佐治亚理工学院机器人学学生和佐治亚理工学院物理学博士后学者克里斯托弗·皮尔斯 (Christopher Pierce),并根据知识共享许可从 The Conversation 重新发布。 阅读原文e.