
蠕蟲狀機器人很快就會協助未來的搜救隊
已發表: 2024-02-25幾十年來,科學家一直在嘗試建造蛇形無肢機器人。 這些機器人可以在搜救情況下派上用場,它們可以在倒塌的建築物中導航以尋找和幫助倖存者。
憑藉細長、靈活的身體,無肢機器人可以輕鬆地穿過狹窄和雜亂的空間,例如廢墟場,而步行或輪式機器人和人類救援人員往往會在這些空間中失敗。
然而,即使是最先進的無肢機器人也無法像蠕蟲和蛇一樣在困難地形中靈活移動。
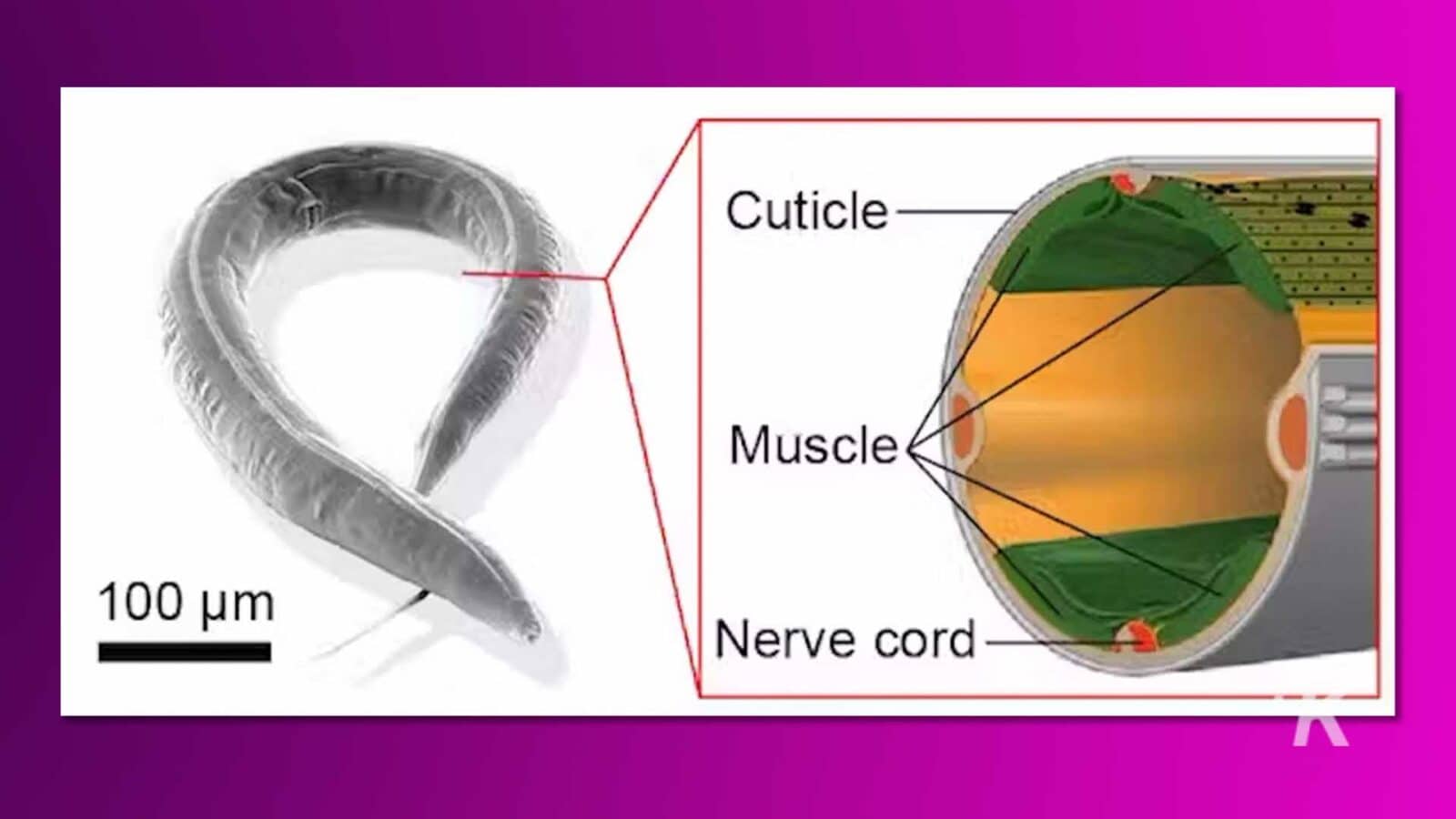
即使是神經系統相對簡單的微小線蟲秀麗隱桿線蟲也能在困難的物理環境中導航。
作為工程師、機器人專家和物理學家團隊的一員,我們希望探索這種性能差異。 但我們沒有向神經科學尋求答案,而是轉向生物力學。
我們著手建立一個機器人模型,該模型使用類似於蠕蟲和蛇驅動其運動的機制來驅動其身體。
波蕩器和機械智能
數千年來,生物體已經進化出複雜的神經系統,使它們能夠感知周圍的物理環境,處理這些資訊並執行精確的身體運動以繞過障礙物。
在機器人技術中,工程師設計演算法,從機器人身體上的感測器(一種機器人神經系統)獲取訊息,並使用該資訊來決定如何移動。 這些演算法和系統通常很複雜。
我們的團隊希望找到一種簡化這些系統的方法,透過強調機械控制的方法來處理不需要感測器或計算的障礙。 為此,我們求助於生物學的例子。
動物不僅依靠神經元(腦細胞和周邊神經)來控制運動。
他們也利用身體的物理特性(例如肌肉的彈性)來幫助他們在神經元有機會做出反應之前自發性地對環境做出反應。
計算系統受數學定律支配,而機械系統則受物理定律支配。 為了完成同樣的任務,科學家可以設計出演算法,或是仔細設計一個物理系統。
例如,無肢機器人和動物透過左右彎曲身體各部位在世界中移動,這種運動稱為波動。
如果他們與障礙物相撞,他們必須轉身並通過向一側彎曲比向另一側彎曲更多來繞過障礙物。 科學家可以透過在機器人的頭部或身體上安裝感測器來實現這一目標。
然後,他們可以設計一種演算法,告訴機器人當「感覺」到頭部或身體上有足夠大的力時轉身離開或繞過障礙物。
或者,科學家可以仔細選擇機器人的材料及其馬達的配置和強度,以便碰撞會自發性地產生導致轉彎的身體形狀。
這個機器人將擁有科學家所說的「機械智能」。
如果像我們這樣的科學家能夠理解生物體如何對其環境中的物體接觸做出機械反應,我們就可以設計出更好的機器人來處理障礙,而無需編寫複雜的演算法。
如果將一組多樣化的波動生物與日益龐大的機器人「蛇」動物園進行比較,機器人和生物波動器之間的一個差異就會很明顯。
幾乎所有波動機器人都使用一系列連接的節段來彎曲其身體,每個節段上都有馬達。 但這並不是生物體彎曲的方式。
相較之下,所有無肢生物體,從大型蛇到低等的微觀線蟲,都不是透過單一旋轉關節運動系統實現彎曲,而是透過身體兩側的兩條肌肉帶來彎曲。
對工程師來說,這種設計似乎違反直覺。 當一個人可以完成這項工作時,為什麼還要用兩塊肌肉或馬達來控制某物呢?
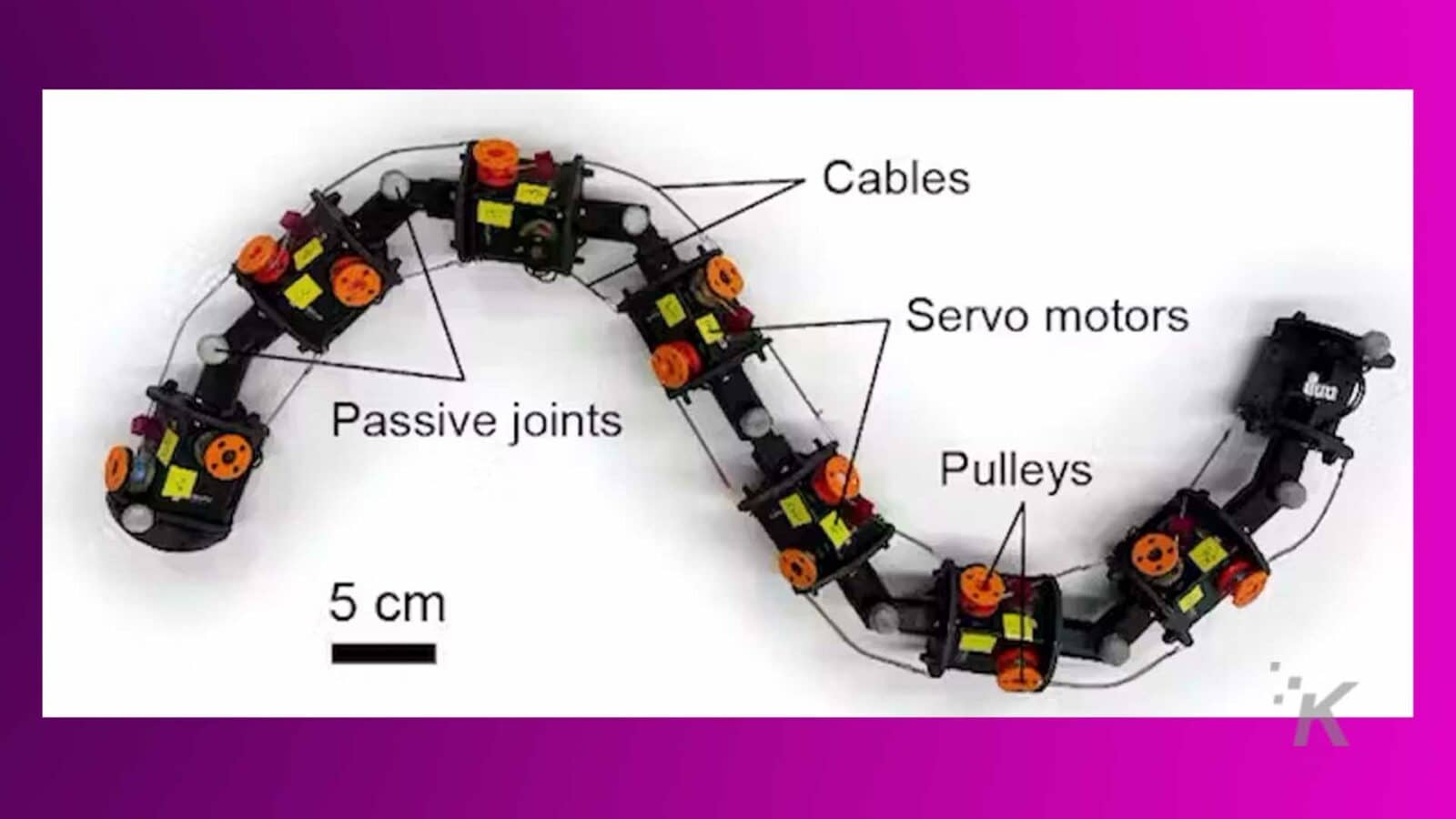
為了弄清楚這個問題的真相,我們的團隊受蛇和蠕蟲身上兩條肌肉帶的啟發,建造了一個名為 MILLR 的新型機器人,即機械智慧無肢機器人。
MILLR 有兩條獨立控制的電纜,可以左右兩側拉動每個關節。
我們發現這種方法可以讓機器人自發性地繞過障礙物移動,而無需感知周圍環境並主動改變身體姿勢以適應環境。
建構機械智慧機器人
MILLR 不是模仿特定生物體的詳細肌肉解剖結構,而是透過纏繞和鬆開電纜向身體的兩側施加力。
這樣,它就反映了蛇和線蟲使用的肌肉激活方法,即左右兩側輪流激活。
這種激活模式透過收緊一側將身體拉向一側或另一側,而另一側則放鬆並被動地被拉動。
透過改變電纜的鬆弛量,我們可以實現不同程度的車身剛度。
當機器人與障礙物碰撞時,根據電纜張力,它有選擇地保持形狀或在障礙物的作用力下彎曲。
我們發現,如果機器人主動向一側彎曲,並且它受到相同方向的力,身體就會順從該力並進一步彎曲。
或者,如果機器人受到抵抗彎曲的力,它會保持剛性並將自己推離障礙物。
由於身體上的張力模式,正面碰撞通常會導致機器人停止移動或卡住,但實際上會自然地導致機器人繞過障礙物並改變方向。
機器人可以不斷地推動自己前進。
測試米爾
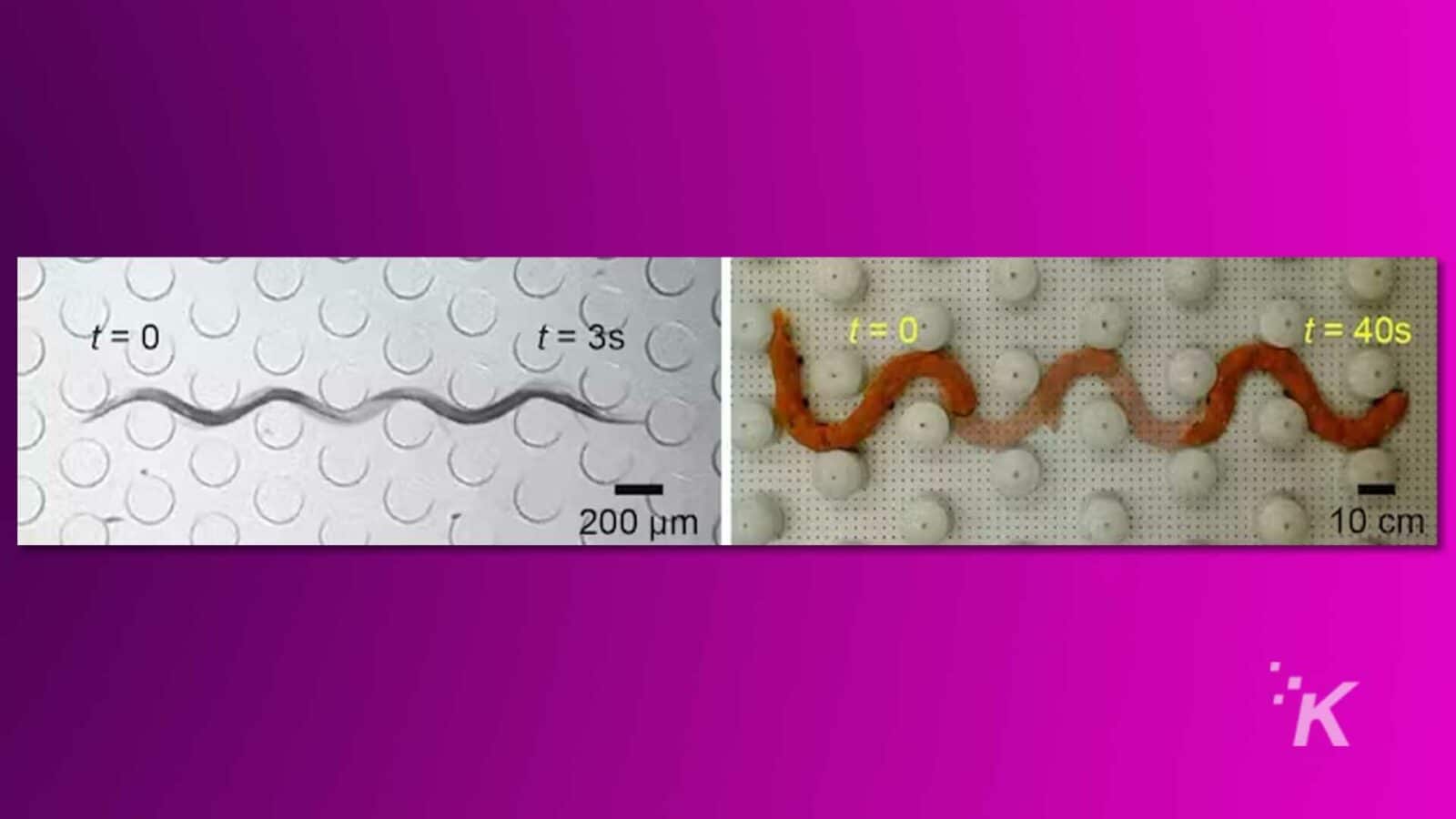
為了研究機械智慧的好處,我們建造了微小的障礙訓練場,並讓線蟲穿過它們,看看它們的表現如何。
我們讓 MILLR 完成了類似的課程並比較了結果。 MILLR 的移動速度與真正的蠕蟲一樣有效。
我們注意到,當蠕蟲與障礙物碰撞時,它們會做出與 MILLR 相同類型的身體運動。 機械智能的原理可以延伸到線蟲的領域之外。
未來的研究可能會著眼於設計基於許多其他類型生物體的機器人,其應用範圍從搜索和救援到探索其他行星。
編輯推薦:
- 資料隱私,就像養育子女一樣,是集體的努力
- 《紐約時報》訴訟中 ChatGPT 的生存岌岌可危
- 人類和 ChatGPT 反映了共同的語言模式——具體如下
- ChatGPT 和其他語言的人工智慧和我們一樣不理性
編按:本文由王天宇博士撰寫。 佐治亞理工學院機器人學學生和佐治亞理工學院物理學博士後學者克里斯托弗·皮爾斯 (Christopher Pierce),並根據知識共享許可從 The Conversation 重新發布。 閱讀原文e.